Chapitre 1
Systèmes de coordonnées cartésiennes
Avant de se pencher sur les aspects moraux et intellectuels de la question qui présentent les plus grandes difficultés, que l’enquêteur commence par maîtriser des problèmes plus élémentaires.
— Sherlock Holmes dans Une étude en rouge (1887)
Les mathématiques 3D consistent à mesurer précisément et mathématiquement des positions, des distances et des angles dans l’espace 3D. Le cadre le plus fréquemment utilisé pour effectuer de tels calculs à l’aide d’un ordinateur est appelé le système de coordonnées cartésiennes. Les mathématiques cartésiennes ont été inventées par (et portent le nom de) un brillant philosophe, physicien, physiologiste et mathématicien français nommé René Descartes, qui vécut de 1596 à 1650. René Descartes est célèbre non seulement pour avoir inventé les mathématiques cartésiennes, qui constituaient à l’époque une unification remarquable de l’algèbre et de la géométrie. Il est également connu pour avoir proposé une excellente tentative de réponse à la question « Comment sais-je qu’une chose est vraie ? »—une question qui a occupé des générations de philosophes et qui n’implique pas nécessairement des moutons morts (qui seront peut-être de manière troublante au cœur de la section suivante), à moins que vous ne le souhaitiez vraiment. Descartes rejeta les réponses proposées par les Grecs anciens, à savoir l’ethos (en gros, « parce que je vous le dis »), le pathos (« parce que ce serait bien »), et le logos (« parce que cela a du sens »), et entreprit de le découvrir par lui-même avec un crayon et du papier.
Ce chapitre est divisé en quatre sections principales.
Section 1.1 passe en revue quelques principes de base des systèmes de numération et la première loi de l’infographie.
Section 1.2 introduit les mathématiques cartésiennes 2D, les mathématiques des surfaces planes. Elle montre comment décrire un espace de coordonnées cartésiennes 2D et comment localiser des points dans cet espace.
Section 1.3 étend ces idées dans les trois dimensions. Elle explique les espaces de coordonnées main gauche et main droite et établit certaines conventions utilisées dans ce livre.
Section 1.4 conclut le chapitre en passant rapidement en revue divers prérequis.
1.1Mathématiques 1D
Vous lisez ce livre parce que vous voulez en savoir plus sur les mathématiques 3D, et vous vous demandez donc probablement pourquoi nous prenons la peine de parler des mathématiques 1D. Eh bien, il y a quelques questions sur les systèmes de numération et le comptage que nous aimerions clarifier avant d’aborder la 3D.
 Figure 1.1Un mouton mort
Figure 1.1Un mouton mort
Les nombres naturels, souvent appelés les nombres de comptage, ont été inventés il y a des millénaires, probablement pour garder la trace des moutons morts. Le concept de « un mouton » est venu facilement (voir Figure 1.1), puis « deux moutons », « trois moutons », mais les gens sont très vite devenus convaincus que c’était trop de travail, et ont arrêté de compter à un certain point qu’ils appelaient invariablement « beaucoup de moutons ». Différentes cultures s’arrêtaient à des stades différents, selon leur seuil d’ennui. La civilisation s’est finalement développée au point où nous pouvions nous permettre d’avoir des gens assis à réfléchir aux nombres plutôt que d’effectuer des tâches davantage orientées vers la survie comme tuer des moutons et les manger. Ces penseurs avisés ont immortalisé le concept de zéro (aucun mouton), et bien qu’ils n’aient pas nommé tous les nombres naturels, ils ont élaboré divers systèmes leur permettant de les nommer s’ils le souhaitaient vraiment, à l’aide de chiffres comme 1, 2, etc. (ou si vous étiez romain, M, X, I, etc.). Ainsi naquirent les mathématiques.
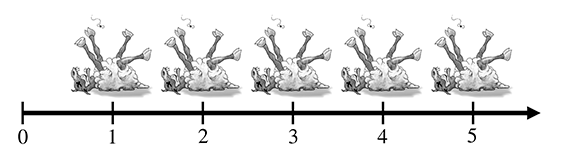
Figure 1.2Une droite numérique pour les nombres naturels
L’habitude d’aligner les moutons en rang pour pouvoir les compter facilement mène au concept de droite numérique, c’est-à-dire une droite sur laquelle les nombres sont marqués à intervalles réguliers, comme dans Figure 1.2. Cette droite peut en principe aller aussi loin que nous le souhaitons, mais pour éviter l’ennui nous nous sommes arrêtés à cinq moutons et avons utilisé une flèche pour indiquer que la droite peut se poursuivre. Les esprits plus clairs peuvent l’imaginer se prolonger jusqu’à l’infini, mais les anciens revendeurs de moutons morts n’y pensaient probablement guère, sauf dans leurs rêves et leurs délires fiévreux.
À un moment de l’histoire, on réalisa probablement que parfois, les orateurs particulièrement habiles pouvaient vendre des moutons qu’ils ne possédaient pas réellement, inventant ainsi simultanément les concepts importants de dette et de nombres négatifs. Ayant vendu ce mouton hypothétique, l’orateur habile possédait en fait « moins un » mouton, conduisant à la découverte des entiers, qui comprennent les nombres naturels et leurs homologues négatifs. La droite numérique correspondante pour les entiers est montrée dans Figure 1.3.
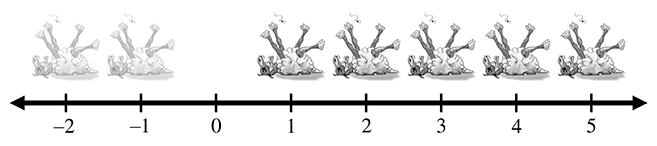
Figure 1.3 Une droite numérique pour les entiers. (Notez le mouton fantôme pour les nombres négatifs.)
Le concept de pauvreté précédait probablement celui de dette, conduisant à un nombre croissant de personnes qui ne pouvaient se permettre d’acheter que la moitié d’un mouton mort, ou peut-être seulement un quart. Cela donna lieu à un usage croissant des nombres fractionnaires, composés d’un entier divisé par un autre, tels que 2/3 ou 111/27. Les mathématiciens les appelèrent nombres rationnels, et ils s’insèrent naturellement dans la droite numérique entre les entiers. À un moment, les gens devinrent paresseux et inventèrent la notation décimale, écrivant « 3,1415 » à la place du plus long et fastidieux 31415/10000, par exemple.
Après un certain temps, on remarqua que certains nombres apparaissant dans la vie quotidienne n’étaient pas exprimables comme nombres rationnels. L’exemple classique est le rapport de la circonférence d’un cercle à son diamètre, généralement noté (la lettre grecque pi, prononcée « pi »). Ce sont les fameux nombres réels, qui incluent les nombres rationnels et des nombres comme qui, si exprimés en notation décimale, nécessiteraient un nombre infini de décimales. Les mathématiques des nombres réels sont considérées par beaucoup comme le domaine le plus important des mathématiques—en fait, elles constituent la base de la plupart des formes d’ingénierie, et peuvent donc être créditées d’avoir créé une grande partie de la civilisation moderne. Ce qui est fascinant avec les nombres réels, c’est que bien que les nombres rationnels soient dénombrables (c’est-à-dire qu’ils peuvent être mis en correspondance biunivoque avec les nombres naturels), les nombres réels sont indénombrables. L’étude des nombres naturels et des entiers s’appelle mathématiques discrètes, et l’étude des nombres réels s’appelle mathématiques continues.
La vérité, cependant, est que les nombres réels ne sont rien de plus qu’une fiction polie. Ce sont une illusion relativement inoffensive, comme vous le dira n’importe quel physicien réputé. L’univers semble être non seulement discret, mais aussi fini. Si l’univers contient un nombre fini de choses discrètes, comme c’est actuellement le cas d’après les apparences, il s’ensuit que nous ne pouvons compter que jusqu’à un certain nombre fixe, après quoi nous manquons de choses à compter—non seulement nous manquons de moutons morts, mais aussi de grille-pains, de mécaniciens et d’assainisseurs de téléphones. Il s’ensuit que nous pouvons décrire l’univers en n’utilisant que les mathématiques discrètes, et seulement un sous-ensemble fini des nombres naturels (grand, certes, mais fini). Quelque part, il existe peut-être une civilisation extraterrestre avec un niveau technologique supérieur au nôtre qui n’a jamais entendu parler des mathématiques continues, du théorème fondamental du calcul, ou même du concept d’infini ; même si nous insistons, ils refuseront fermement mais poliment d’avoir affaire à , se contentant de construire des grille-pains, des ponts, des gratte-ciel, des transports en commun et des vaisseaux spatiaux avec 3,14159 (ou peut-être 3,1415926535897932384626433832795 s’ils sont méticuleux).
Pourquoi utilisons-nous donc les mathématiques continues ? Parce qu’elles sont un outil utile qui nous permet de faire de l’ingénierie. Mais le monde réel est, malgré la dissonance cognitive qu’implique l’utilisation du terme « réel », discret. Comment cela vous affecte-t-il, en tant que concepteur d’une réalité virtuelle 3D générée par ordinateur ? L’ordinateur est, par nature, discret et fini, et vous êtes plus susceptible de vous heurter aux conséquences de cette discrétion et de cette finitude lors de sa création que dans le monde réel. Le C++ vous offre différentes formes de nombres que vous pouvez utiliser pour compter ou mesurer dans votre monde virtuel. Ce sont le short, le int, le float et le double, qui peuvent être décrits comme suit (en supposant la technologie PC actuelle). Le short est un entier sur 16 bits qui peut stocker 65 536 valeurs différentes, ce qui signifie que « beaucoup de moutons » pour un ordinateur 16 bits représente 65 537. Cela semble être beaucoup de moutons, mais c’est insuffisant pour mesurer des distances dans n’importe quel type raisonnable de réalité virtuelle que des personnes mettent plus de quelques minutes à explorer. Le int est un entier sur 32 bits qui peut stocker jusqu’à 4 294 967 296 valeurs différentes, ce qui est probablement suffisant pour vos besoins. Le float est une valeur sur 32 bits qui peut stocker un sous-ensemble des rationnels (légèrement moins de 4 294 967 296, les détails n’étant pas importants ici). Le double est similaire, utilisant 64 bits au lieu de 32.
L’essentiel dans le choix d’utiliser des ints, des floats ou des doubles pour compter et mesurer dans votre monde virtuel n’est pas, comme certains personnes mal informées le prétendent, une question de choix entre les shorts et les ints discrets versus les floats et les doubles continus ; c’est plutôt une question de précision. Ils sont tous discrets en fin de compte. Les anciens ouvrages sur l’infographie vous conseillaient d’utiliser des entiers parce que le matériel virgule flottante était plus lent que le matériel entier, mais ce n’est plus le cas. En fait, l’introduction de processeurs vectoriels virgule flottante dédiés a rendu l’arithmétique virgule flottante plus rapide que l’arithmétique entière dans de nombreux cas courants. Lequel choisir donc ? À ce stade, il vaut probablement mieux vous présenter la première loi de l’infographie et vous laisser y réfléchir.
La première loi de l’infographie
Si ça semble juste, c’est que c’est juste.
Nous ferons beaucoup de trigonométrie dans ce livre. La trigonométrie implique des nombres réels tels que , et des fonctions à valeurs réelles telles que le sinus et le cosinus (auxquels nous reviendrons plus tard). Les nombres réels sont une fiction commode, aussi continuerons-nous à les utiliser. Comment savez-vous que c’est vrai ? Parce que, Descartes mis à part, nous vous le disons, parce que ce serait bien, et parce que cela a du sens.
1.2Espace cartésien 2D
Vous avez probablement déjà utilisé des systèmes de coordonnées cartésiennes 2D même si vous n’avez jamais entendu le terme « cartésien » auparavant. « Cartésien » est principalement un terme élaboré pour dire « rectangulaire ». Si vous avez déjà regardé le plan d’une maison, utilisé un plan de ville, regardé un match de football1 ou joué aux échecs, vous avez une certaine expérience des espaces de coordonnées cartésiennes 2D.
Cette section introduit les mathématiques cartésiennes 2D, les mathématiques des surfaces planes. Elle est divisée en trois sous-sections principales.
Section 1.2.1 propose une introduction progressive au concept d’espace cartésien 2D en imaginant une ville fictive appelée Cartésia.
Section 1.2.2 généralise ce concept aux espaces cartésiens 2D arbitraires ou abstraits. Les principaux concepts introduits sont
l’origine
les axes et
l’orientation des axes en 2D
Section 1.2.3 décrit comment spécifier la position d’un point dans le plan 2D à l’aide de coordonnées cartésiennes .
1.2.1Un exemple : la ville hypothétique de Cartésia
Imaginons une ville fictive nommée Cartésia. Lorsque les urbanistes de Cartésia planifiaient les rues, ils étaient très exigeants, comme l’illustre la carte de Cartésia dans Figure 1.4.
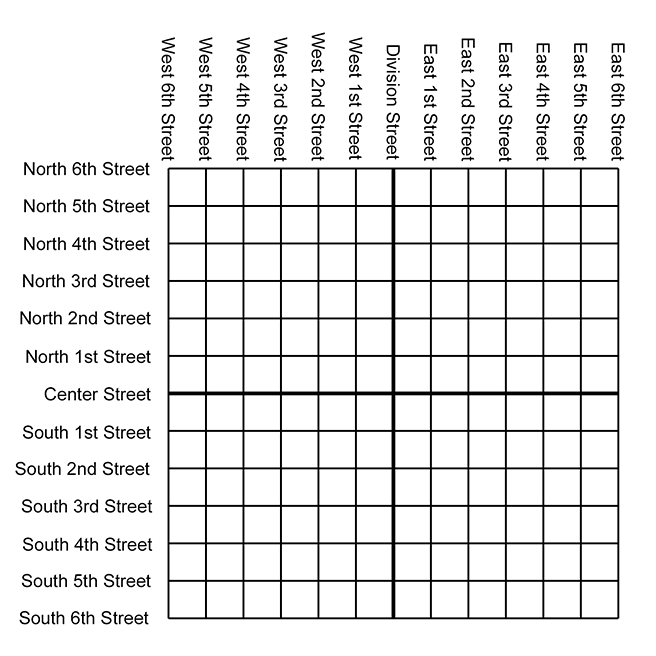
Figure 1.4 Carte de la ville hypothétique de Cartésia
Comme vous pouvez le voir sur la carte, la rue du Centre (Center Street) s’étend d’est en ouest au milieu de la ville. Toutes les autres rues est-ouest (parallèles à la rue du Centre) sont nommées selon qu’elles se trouvent au nord ou au sud de la rue du Centre, et selon leur distance par rapport à elle. Des exemples de rues est-ouest sont la 3ème Rue Nord et la 15ème Rue Sud.
Les autres rues de Cartésia s’étendent du nord au sud. La rue de la Division (Division Street) s’étend du nord au sud au milieu de la ville. Toutes les autres rues nord-sud (parallèles à la rue de la Division) sont nommées selon qu’elles se trouvent à l’est ou à l’ouest de la rue de la Division, et selon leur distance par rapport à elle. Nous avons ainsi des rues comme la 5ème Rue Est et la 22ème Rue Ouest.
La convention de nommage utilisée par les urbanistes de Cartésia n’est peut-être pas créative, mais elle est certainement pratique. Même sans regarder la carte, il est facile de trouver la boutique de beignets au coin de la 4ème Rue Nord et de la 2ème Rue Ouest. Il est également facile de déterminer la distance à parcourir en voiture d’un endroit à un autre. Par exemple, pour aller de cette boutique de beignets au coin de la 4ème Rue Nord et de la 2ème Rue Ouest, au commissariat au coin de la 3ème Rue Sud et de la rue de la Division, vous devriez parcourir sept pâtés de maisons vers le sud et deux pâtés vers l’est.
1.2.2Espaces de coordonnées 2D arbitraires
Avant que Cartésia ne soit construite, il n’y avait qu’une grande étendue de terrain plat. Les urbanistes ont arbitrairement décidé où serait le centre-ville, dans quelle direction les routes iraient, l’espacement entre les routes, et ainsi de suite. De même que les urbanistes de Cartésia ont tracé les rues, nous pouvons établir un système de coordonnées cartésiennes 2D où nous le souhaitons—sur un morceau de papier, un échiquier, un tableau noir, une dalle de béton ou un terrain de football.
Figure 1.5 montre un diagramme d’un système de coordonnées cartésiennes 2D.
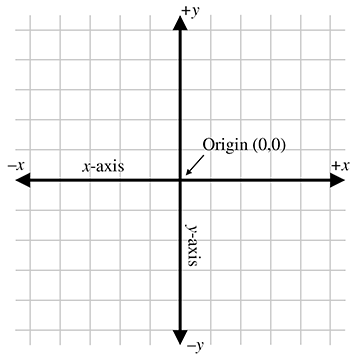
Figure 1.5Un espace de coordonnées cartésiennes 2D
Comme illustré dans Figure 1.5, un espace de coordonnées cartésiennes 2D est défini par deux éléments :
Tout espace de coordonnées cartésiennes 2D possède un emplacement particulier, appelé l’origine, qui est le « centre » du système de coordonnées. L’origine est analogue au centre de la ville dans Cartésia.
Tout espace de coordonnées cartésiennes 2D possède deux droites passant par l’origine. Chaque droite est appelée un axe et s’étend infiniment dans deux directions opposées. Les deux axes sont perpendiculaires l’un à l’autre. (En fait, ils n’ont pas besoin de l’être, mais la plupart des systèmes de coordonnées que nous examinerons auront des axes perpendiculaires.) Les deux axes sont analogues aux rues du Centre et de la Division dans Cartésia. Les lignes de grille dans le diagramme sont analogues aux autres rues de Cartésia.
À ce stade, il est important de souligner quelques différences significatives entre Cartésia et un espace mathématique abstrait 2D :
La ville de Cartésia a des limites officielles. Les terrains situés en dehors des limites de la ville ne sont pas considérés comme faisant partie de Cartésia. Un espace de coordonnées 2D, cependant, s’étend infiniment. Même si nous nous préoccupons généralement d’une petite zone dans le plan défini par l’espace de coordonnées, ce plan est en théorie illimité. De plus, les routes de Cartésia ne vont que jusqu’à une certaine distance (peut-être jusqu’aux limites de la ville) et s’arrêtent. En revanche, nos axes et lignes de grille s’étendent potentiellement à l’infini dans deux directions.
Dans Cartésia, les routes ont une épaisseur. En revanche, les droites dans un espace de coordonnées abstrait ont une position et une longueur (potentiellement infinie), mais pas d’épaisseur réelle.
Dans Cartésia, on ne peut conduire que sur les routes. Dans un espace de coordonnées abstrait, chaque point du plan de l’espace de coordonnées fait partie de l’espace de coordonnées, pas seulement les « routes ». Les lignes de grille ne sont tracées qu’à titre de référence.
Dans Figure 1.5, l’axe horizontal est appelé l’axe , avec les valeurs positives de pointant vers la droite, et l’axe vertical est l’axe , avec les valeurs positives de pointant vers le haut. C’est l’orientation habituelle des axes dans un diagramme. Notez que « horizontal » et « vertical » sont des termes inappropriés pour de nombreux espaces 2D qui apparaissent en pratique. Par exemple, imaginez l’espace de coordonnées sur un bureau. Les deux axes sont « horizontaux », et aucun axe n’est vraiment « vertical ».
Les urbanistes de Cartésia auraient pu faire courir la rue du Centre du nord au sud plutôt que d’est en ouest. Ou ils auraient pu l’orienter dans un angle totalement arbitraire. Par exemple, Long Island, à New York, rappelle Cartésia, où par commodité les « rues » (1ère Rue, 2ème Rue, etc.) traversent l’île, et les « avenues » (1ère Avenue, 2ème Avenue, etc.) suivent son grand axe. L’orientation géographique du grand axe de l’île est un résultat arbitraire de la nature. De la même manière, nous sommes libres d’orienter nos axes de la façon qui nous convient le mieux. Nous devons également décider pour chaque axe quelle direction nous considérons comme positive. Par exemple, lorsque nous travaillons avec des images sur un écran d’ordinateur, il est habituel d’utiliser le système de coordonnées montré dans Figure 1.6. Remarquons que l’origine est dans le coin supérieur gauche, que pointe vers la droite et que pointe vers le bas plutôt que vers le haut.
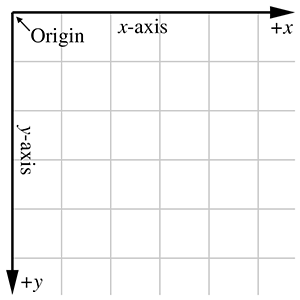
Figure 1.6Espace de coordonnées écran
Malheureusement, lors de la planification de Cartésia, les seuls cartographes disponibles se trouvaient dans la ville voisine de Dyslexia. Le fonctionnaire subalterne qui avait envoyé l’appel d’offres avait négligé de tenir compte du fait que le cartographe dyslexique était aussi susceptible de dessiner ses cartes avec le nord pointant vers le haut, vers le bas, vers la gauche ou vers la droite. Bien qu’il ait toujours tracé la ligne est-ouest à angle droit avec la ligne nord-sud, il confondait souvent l’est et l’ouest. Quand son supérieur réalisa que le travail avait été confié au moins-disant, qui se trouvait habiter à Dyslexia, de nombreuses heures furent consacrées à des réunions de comité pour déterminer quoi faire. Les formalités avaient été accomplies, le bon de commande avait été émis, et les bureaucraties étant ce qu’elles sont, il serait trop coûteux et chronophage d’annuler la commande. Néanmoins, personne ne savait ce que le cartographe allait livrer. Un comité fut rapidement constitué.
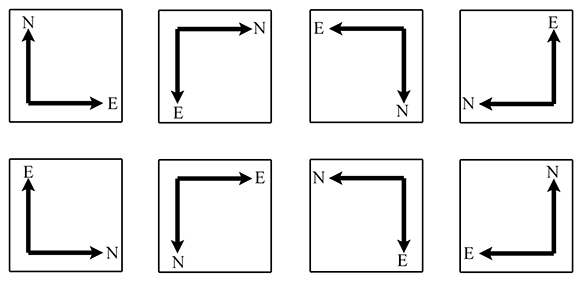
Figure 1.7 Orientations possibles des axes de la carte en 2D
Le comité décida assez rapidement qu’il n’existait que huit orientations possibles que le cartographe pourrait livrer, représentées dans Figure 1.7. Dans le meilleur des mondes, il livrerait une carte orientée comme dans le rectangle en haut à gauche, avec le nord pointant vers le haut et l’est vers la droite, ce à quoi les gens s’attendent habituellement. Un sous-comité constitué à cet effet décida d’appeler cela l’orientation normale.
Après que la réunion eut duré quelques heures et que les esprits commençaient à s’échauffer, il fut décidé que les trois autres variantes montrées dans la première ligne de Figure 1.7 étaient probablement aussi acceptables, car elles pouvaient être transformées en orientation normale en plantant une épingle au centre de la page et en faisant tourner la carte autour de l’épingle. (Vous pouvez aussi le faire vous-même en posant ce livre à plat sur une table et en le tournant.) De nombreuses heures furent gaspillées par des fonctionnaires fatigués à planter des épingles dans divers endroits des cartes de la deuxième ligne de Figure 1.7, mais peu importe à quelle vitesse ils les faisaient tourner, ils ne parvenaient pas à les transformer en orientation normale. Ce n’est qu’après que tout le monde d’important se fut découragé et rentré chez soi qu’un stagiaire fatigué, chargé de débarrasser les tasses à café usagées, remarqua que les cartes de la deuxième ligne pouvaient être transformées en orientation normale en les tenant contre la lumière et en les regardant par derrière. (Vous pouvez aussi le faire en tenant Figure 1.7 contre la lumière et en la regardant par derrière—vous devrez aussi la tourner, bien sûr.) L’écriture était également inversée, mais il fut décidé que si Léonard de Vinci (1452–1519) pouvait gérer l’écriture inversée au XVe siècle, alors les citoyens de Cartésia, bien que n’étant en aucun cas ses équivalents intellectuels (probablement à cause de la télévision en journée), pourraient probablement le gérer au XXIe siècle.
En résumé, quelle que soit l’orientation que nous choisissons pour les axes et , nous pouvons toujours faire pivoter l’espace de coordonnées de manière à ce que pointe vers notre droite et vers le haut. Pour notre exemple de coordonnées d’espace écran, imaginez retourner le système de coordonnées à l’envers et regarder l’écran depuis l’arrière du moniteur. Dans tous les cas, ces rotations ne déforment pas la forme originale du système de coordonnées (même si nous le regardons à l’envers ou en miroir). Donc dans un certain sens particulier, tous les systèmes de coordonnées 2D sont « équivalents ». Dans Section 1.3.3, nous découvrons le fait surprenant que ce n’est pas le cas en 3D.
1.2.3Spécifier des positions en 2D à l’aide de coordonnées cartésiennes
Un espace de coordonnées est un cadre pour spécifier une position avec précision. Un gentilhomme de Cartésia pourrait, s’il souhaitait indiquer à sa belle où le rejoindre pour le dîner, par exemple, consulter la carte dans Figure 1.4 et dire : « Retrouvons-nous à l’angle de la 2ème Rue Est et de la 4ème Rue Nord. » Remarquons qu’il spécifie deux coordonnées, une dans la dimension horizontale (2ème Rue Est, listée en haut de la carte dans Figure 1.4) et une dans la dimension verticale (4ème Rue Nord, listée à gauche de la carte). S’il souhaitait être concis, il pourrait abréger « 2ème Rue Est » en « 2 » et « 4ème Rue Nord » en « 4 » et dire à sa belle, de manière quelque peu cryptique, « Retrouvons-nous à ( ). »
Le couple ordonné ( ) est un exemple de ce qu’on appelle des coordonnées cartésiennes. En 2D, deux nombres sont utilisés pour spécifier une position. (Le fait que nous utilisions deux nombres pour décrire la position d’un point est la raison pour laquelle on l’appelle espace à deux dimensions. En 3D, nous utiliserons trois nombres.) La première coordonnée (le dans notre exemple ( )) est appelée la -coordonnée, et la seconde coordonnée (le dans notre exemple ( )) est appelée la -coordonnée.
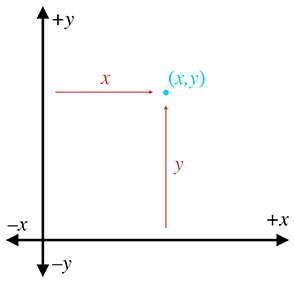
Figure 1.8 Comment localiser un point à l’aide de coordonnées cartésiennes 2D
Analogues aux noms de rues dans Cartésia, chacune des deux coordonnées spécifie de quel côté de l’origine se trouve le point et à quelle distance le point se trouve de l’origine dans cette direction. Plus précisément, chaque coordonnée est la distance signée (c’est-à-dire positive dans une direction et négative dans l’autre) à l’un des axes, mesurée le long d’une droite parallèle à l’autre axe. Essentiellement, nous utilisons des coordonnées positives pour les rues est et nord et des coordonnées négatives pour les rues sud et ouest. Comme le montre Figure 1.8, la -coordonnée désigne la distance signée du point à l’axe , mesurée le long d’une droite parallèle à l’axe . De même, la -coordonnée désigne la distance signée du point à l’axe , mesurée le long d’une droite parallèle à l’axe .
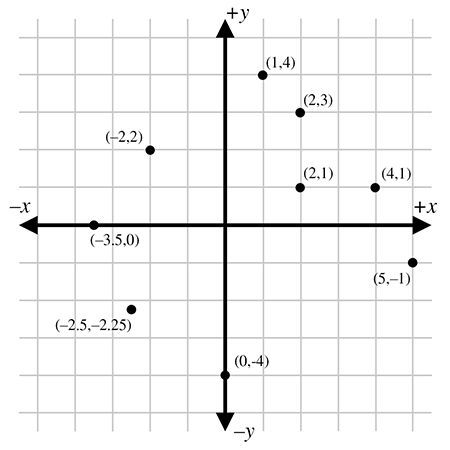
Figure 1.9 Exemples de points étiquetés avec des coordonnées cartésiennes 2D
Figure 1.9 montre plusieurs points et leurs coordonnées cartésiennes. Remarquons que les points à gauche de l’axe ont des valeurs négatives, et ceux à droite de l’axe ont des valeurs positives. De même, les points avec des valeurs positives sont au-dessus de l’axe , et les points avec des valeurs négatives sont en dessous de l’axe . Remarquons également que tout point peut être spécifié, pas seulement les points aux intersections des lignes de grille. Étudiez cette figure jusqu’à ce que vous soyez sûr de comprendre le schéma.
Regardons de plus près les lignes de grille habituellement représentées dans un diagramme. Remarquons qu’une ligne de grille verticale est composée de points qui ont tous la même -coordonnée. En d’autres termes, une ligne de grille verticale (en fait, toute ligne verticale) marque une ligne de constant. De même, une ligne de grille horizontale marque une ligne de constant ; tous les points sur cette ligne ont la même -coordonnée. Nous reviendrons sur cette idée dans un instant lorsque nous aborderons les espaces de coordonnées polaires.
1.3Espace cartésien 3D
Les sections précédentes ont expliqué comment fonctionne le système de coordonnées cartésiennes en 2D. Il est maintenant temps de quitter le monde plat de la 2D et de penser à l’espace 3D.
Il pourrait sembler au premier abord que l’espace 3D est seulement « 50 % plus complexe » que la 2D. Après tout, c’est juste une dimension de plus, et nous en avions déjà deux. Malheureusement, ce n’est pas le cas. Pour diverses raisons, l’espace 3D est plus que progressivement plus difficile à visualiser et à décrire pour les êtres humains que l’espace 2D. (Une raison possible de cette difficulté pourrait être que notre monde physique est 3D, alors que les illustrations dans les livres et sur les écrans d’ordinateur sont 2D.) Il est fréquent qu’un problème « facile » à résoudre en 2D soit beaucoup plus difficile ou même indéfini en 3D. Cependant, de nombreux concepts en 2D se prolongent directement en 3D, et nous utilisons souvent la 2D pour comprendre un problème et développer une solution, puis étendons cette solution en 3D.
Cette section étend les mathématiques cartésiennes 2D à la 3D. Elle est divisée en quatre sous-sections principales.
Section 1.3.1 commence l’extension de la 2D vers la 3D en ajoutant un troisième axe. Les principaux concepts introduits sont :
l’axe
les plans , et
Section 1.3.2 décrit comment spécifier la position d’un point dans l’espace 3D à l’aide de coordonnées cartésiennes .
Section 1.3.3 introduit les concepts d’espaces de coordonnées 3D main gauche et main droite. Les principaux concepts introduits sont :
la règle de la main, une définition informelle des espaces de coordonnées main gauche et main droite
les différences de rotation dans les espaces de coordonnées main gauche et main droite
comment convertir de l’un à l’autre
ni l’un ni l’autre n’est meilleur, ils sont seulement différents
Section 1.3.4 décrit certaines conventions utilisées dans ce livre.
1.3.1Une dimension de plus, un axe de plus
En 3D, nous avons besoin de trois axes pour établir un système de coordonnées. Les deux premiers axes sont appelés l’axe et l’axe , tout comme en 2D. (Cependant, il n’est pas tout à fait exact de dire que ce sont les mêmes que les axes 2D ; nous y reviendrons plus tard.) Nous appelons le troisième axe (de manière prévisible) l’axe . En général, nous configurons les choses de sorte que tous les axes soient mutuellement perpendiculaires, c’est-à-dire que chacun est perpendiculaire aux autres. Figure 1.10 montre un exemple d’espace de coordonnées 3D.
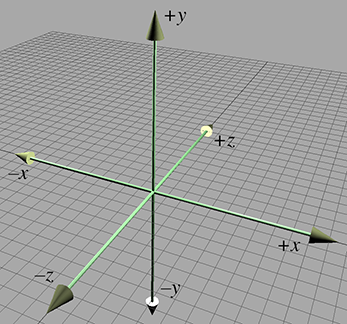
Figure 1.10 Un espace de coordonnées cartésiennes 3D
Comme évoqué dans Section 1.2.2, la convention en 2D est que pointe vers la droite et vers le haut. (Ou parfois peut pointer vers le bas, mais dans tous les cas, l’axe est horizontal et l’axe est vertical.) Ces conventions en 2D sont assez standardisées. En 3D, cependant, les conventions pour la disposition des axes dans les diagrammes et l’attribution des axes aux dimensions physiques (gauche, droite, haut, bas, avant, arrière) ne sont pas très standardisées. Différents auteurs et domaines d’étude ont des conventions différentes. Section 1.3.4 aborde les conventions utilisées dans ce livre.
Comme mentionné précédemment, il n’est pas tout à fait approprié de dire que l’axe et l’axe en 3D sont « les mêmes » que l’axe et l’axe en 2D. En 3D, toute paire d’axes définit un plan qui contient les deux axes et est perpendiculaire au troisième axe. Par exemple, le plan contenant les axes et est le plan , qui est perpendiculaire à l’axe . De même, le plan est perpendiculaire à l’axe , et le plan est perpendiculaire à l’axe . Nous pouvons considérer n’importe lequel de ces plans comme un espace de coordonnées cartésiennes 2D à part entière. Par exemple, si nous assignons , et pour pointer respectivement vers la droite, vers le haut et vers l’avant, alors l’espace de coordonnées 2D du « sol » est le plan , comme montré dans Figure 1.10.
1.3.2Spécifier des positions en 3D
En 3D, les points sont spécifiés à l’aide de trois nombres, , et , qui donnent la distance signée aux plans , et , respectivement. Cette distance est mesurée le long d’une droite parallèle à l’axe. Par exemple, la valeur est la distance signée au plan , mesurée le long d’une droite parallèle à l’axe . Ne laissez pas cette définition précise de la façon dont les points en 3D sont localisés vous troubler. C’est une extension directe du processus pour la 2D, comme montré dans Figure 1.11.
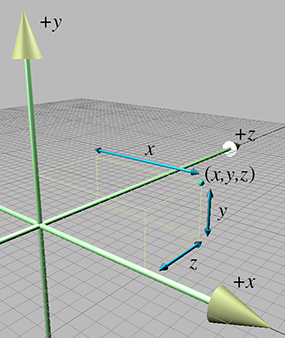
Figure 1.11Localiser des points en 3D
1.3.3Espaces de coordonnées main gauche versus main droite
Comme nous l’avons évoqué dans Section 1.2.2, tous les systèmes de coordonnées 2D sont « équivalents » dans le sens où pour deux espaces de coordonnées 2D et quelconques, nous pouvons faire pivoter l’espace de coordonnées de sorte que et pointent dans la même direction que dans l’espace de coordonnées . (Nous supposons des axes perpendiculaires.) Examinons cette idée plus en détail.
Figure 1.5 montre l’espace de coordonnées 2D « standard ». Remarquons que la différence entre cet espace de coordonnées et l’espace de coordonnées « écran » montré dans Figure 1.6 est que l’axe pointe dans des directions opposées. Cependant, imaginez faire pivoter Figure 1.6 de 180 degrés dans le sens horaire de sorte que pointe vers le haut et vers la gauche. Faites ensuite pivoter en « retournant la page » et en regardant le diagramme par derrière. Remarquez que les axes sont maintenant orientés dans les directions « standard » comme dans Figure 1.5. Peu importe combien de fois nous retournons un axe, nous pouvons toujours trouver un moyen de revenir à l’orientation standard.
Voyons comment cette idée s’étend à la 3D. Examinons à nouveau Figure 1.10. Nous avons indiqué précédemment que pointe vers l’intérieur de la page. Est-ce obligatoire ? Et si nous faisions pointer hors de la page ? C’est certainement autorisé, alors retournons l’axe .
Pouvons-nous maintenant faire pivoter le système de coordonnées de sorte qu’il s’aligne avec le système de coordonnées d’origine ? Il s’avère que nous ne pouvons pas. Nous pouvons faire pivoter pour aligner deux axes à la fois, mais le troisième axe pointe toujours dans la mauvaise direction ! (Si vous avez du mal à visualiser cela, ne vous inquiétez pas. Dans un instant nous illustrerons ce principe de façon plus concrète.)
Tous les espaces de coordonnées 3D ne sont pas équivalents, dans le sens où certaines paires de systèmes de coordonnées ne peuvent pas être mis en rotation pour s’aligner l’un sur l’autre. Il existe exactement deux types distincts d’espaces de coordonnées 3D : les espaces de coordonnées main gauche et les espaces de coordonnées main droite. Si deux espaces de coordonnées ont la même chiralité, ils peuvent être mis en rotation de sorte que les axes s’alignent. S’ils sont de chiralité opposée, cela n’est pas possible.
Que signifient exactement « main gauche » et « main droite » ? La façon la plus intuitive d’identifier la chiralité d’un système de coordonnées particulier est d’utiliser, eh bien, vos mains ! Avec votre main gauche, faites un « L » avec votre pouce et votre index.2 Votre pouce doit pointer vers votre droite, et votre index doit pointer vers le haut. Maintenant étendez votre troisième doigt3 de sorte qu’il pointe directement vers l’avant. Vous venez de former un système de coordonnées main gauche. Votre pouce, votre index et votre majeur pointent respectivement dans les directions , et . Cela est illustré dans Figure 1.12.
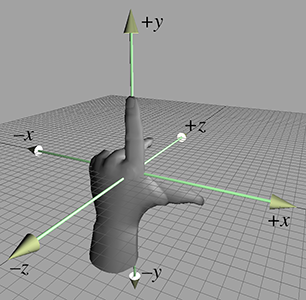
Figure 1.12 Espace de coordonnées main gauche
Répétez maintenant la même expérience avec votre main droite. Remarquez que votre index pointe toujours vers le haut et que votre majeur pointe vers l’avant. Cependant, avec votre main droite, votre pouce pointera vers la gauche. C’est un système de coordonnées main droite. Là encore, votre pouce, votre index et votre majeur pointent respectivement dans les directions , et . Un système de coordonnées main droite est illustré dans Figure 1.13.
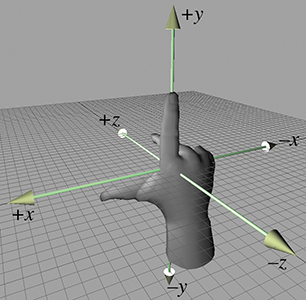
Figure 1.13Espace de coordonnées main droite
Essayez tant que vous voudrez, vous ne pouvez pas faire pivoter vos mains dans une position où les trois doigts pointent simultanément dans la même direction sur les deux mains. (Plier les doigts n’est pas autorisé.)
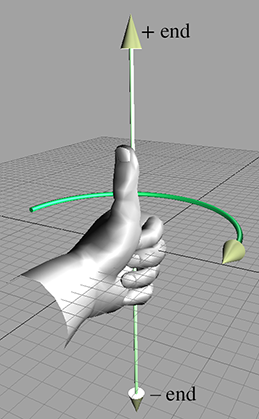
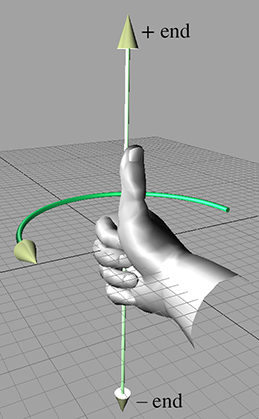
Les systèmes de coordonnées main gauche et main droite diffèrent également dans la définition de la « rotation positive ». Supposons que nous ayons une droite dans l’espace et que nous devions effectuer une rotation autour de cette droite d’un angle donné. Nous appelons cette droite un axe de rotation, mais n’imaginez pas que le mot axe implique que nous ne parlons que d’un des axes cardinaux (l’axe -, - ou -). Un axe de rotation peut être orienté de manière arbitraire. Maintenant, si vous me dites « tourner de autour de l’axe », comment sais-je dans quel sens tourner ? Nous devons nous mettre d’accord entre nous qu’une direction de rotation est la direction positive, et que l’autre direction est la direction négative. La manière standard de déterminer laquelle est laquelle dans un système de coordonnées main gauche est appelée la règle de la main gauche. Tout d’abord, nous devons définir dans quelle direction notre axe « pointe ». Bien sûr, l’axe de rotation est théoriquement de longueur infinie, mais nous considérons qu’il a quand même un bout positif et un bout négatif, tout comme les axes cardinaux normaux qui définissent notre espace de coordonnées. La règle de la main gauche fonctionne ainsi : mettez votre main gauche en position « pouce levé », avec votre pouce pointant vers l’extrémité positive de l’axe de rotation. La rotation positive autour de l’axe de rotation se fait dans la direction dans laquelle vos doigts se courbent. Il existe une règle correspondante pour les espaces de coordonnées main droite ; ces deux règles sont illustrées dans Figure 1.14.
 |
 |
| Règle de la main gauche | Règle de la main droite |
Figure 1.14 La règle de la main gauche et la règle de la main droite définissent quelle direction est considérée comme rotation « positive ».
Comme vous pouvez le voir, dans un système de coordonnées main gauche, la rotation positive est horaire vue depuis l’extrémité positive de l’axe, et dans un système de coordonnées main droite, la rotation positive est antihoraire. Tableau 1.1 montre ce qui se passe lorsque nous appliquons cette règle générale au cas particulier des axes cardinaux.
En regardant
vers l’origine
depuis…
Rotation positive
Rotation négative
Main gauche : Horaire
Main gauche : Antihoraire
Main droite : Antihoraire
Main droite : Horaire
Tableau 1.1 Rotation autour des axes cardinaux dans les systèmes de coordonnées main gauche et main droite
Tout système de coordonnées main gauche peut être transformé en système de coordonnées main droite, et vice versa. La façon la plus simple de le faire est d’échanger les extrémités positives et négatives d’un axe. Notez que si nous retournons deux axes, c’est équivalent à faire pivoter l’espace de coordonnées de autour du troisième axe, ce qui ne change pas la chiralité de l’espace de coordonnées. Une autre façon de modifier la chiralité d’un système de coordonnées est d’échanger deux axes.
Les systèmes de coordonnées main gauche et main droite sont tous deux parfaitement valides, et malgré ce que vous pourriez lire dans d’autres livres, aucun n’est « meilleur » que l’autre. Les personnes dans divers domaines d’étude ont certainement des préférences pour l’un ou l’autre, selon leur formation. Par exemple, certaines publications récentes en infographie utilisent des systèmes de coordonnées main gauche, tandis que les textes graphiques traditionnels et les personnes davantage orientées vers l’algèbre linéaire mathématique tendent à préférer les systèmes de coordonnées main droite. Bien sûr, ce sont là des généralisations grossières, il faut donc toujours vérifier quel système de coordonnées est utilisé. L’essentiel, cependant, est que dans de nombreux cas c’est simplement une question de signe négatif dans la -coordonnée. Donc, en faisant appel à la première loi de l’infographie de Section 1.1, si vous appliquez un outil, une technique ou une ressource provenant d’un autre livre, d’une page web ou d’un article et que le résultat ne semble pas correct, essayez d’inverser le signe de l’axe .
1.3.4Quelques conventions importantes utilisées dans ce livre
Lors de la conception d’un monde virtuel 3D, plusieurs décisions de conception doivent être prises à l’avance, comme le choix du système de coordonnées main gauche ou main droite, la direction de , et ainsi de suite. Les cartographes de Dyslexia devaient choisir parmi huit façons différentes d’assigner les axes en 2D (voir Figure 1.7). En 3D, nous avons au total 48 combinaisons différentes parmi lesquelles choisir ; 24 de ces combinaisons sont main gauche, et 24 sont main droite. (Exercice 3 vous demande de les lister toutes.)
Différentes situations peuvent nécessiter des conventions différentes, dans le sens où certaines tâches peuvent être plus faciles si vous adoptez les bonnes conventions. En général, cependant, ce n’est pas un problème majeur tant que vous établissez les conventions tôt dans votre processus de conception et que vous vous y tenez. (En fait, le choix vous est le plus souvent imposé par le moteur ou le framework que vous utilisez, car très peu de personnes repartent de zéro de nos jours.) Tous les principes de base abordés dans ce livre sont applicables quel que soit les conventions utilisées. Dans la plupart des cas, toutes les équations et techniques présentées sont également applicables quelle que soit la convention.4 Cependant, dans certains cas, il existe des différences légères mais critiques dans l’application concernant les espaces de coordonnées main gauche versus main droite. Lorsque ces différences apparaîtront, nous les signalerons.
Nous utilisons un système de coordonnées main gauche dans ce livre. Les directions , et pointent respectivement vers la droite, vers le haut et vers l’avant, comme montré dans Figure 1.15. Dans les situations où « droite » et « avant » ne sont pas des termes appropriés (par exemple, lorsque nous parlons de l’espace de coordonnées monde), nous attribuons à « est » et à « nord ».
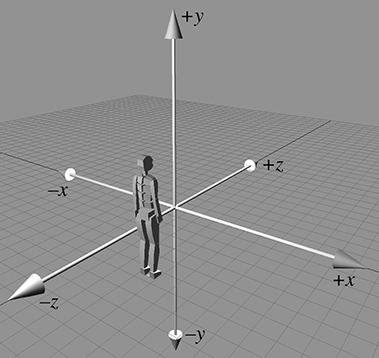
Figure 1.15 Les conventions du système de coordonnées main gauche utilisées dans ce livre
1.4Divers et variés
Dans ce livre, nous consacrons beaucoup de temps à nous concentrer sur des éléments cruciaux souvent relégués à une présentation succincte enfouie dans une annexe dans les livres qui considèrent ce matériel comme un prérequis. Nous aussi devons supposer un niveau de connaissances mathématiques non nul de la part du lecteur, sans quoi chaque livre ne dépasserait jamais la revue des premiers principes, et nous avons donc aussi notre présentation succincte de certains prérequis. Dans cette section, nous présentons quelques éléments de connaissance mathématique avec lesquels la plupart des lecteurs sont probablement familiers, mais pourraient avoir besoin d’un bref rappel.
1.4.1Notation de la somme et du produit
La notation de la somme est un raccourci pour écrire la somme d’une liste d’éléments. C’est un peu comme une boucle for mathématique. Regardons un exemple :
Notation de la somme
La variable est connue comme la variable d’indice. Les expressions au-dessus et en dessous du symbole de somme nous indiquent combien de fois exécuter notre « boucle » et quelles valeurs utiliser pour à chaque itération. Dans ce cas, comptera de 1 à 6. Pour « exécuter » notre boucle, nous itérons l’indice sur toutes les valeurs spécifiées par les conditions de contrôle. Pour chaque itération, nous évaluons l’expression à droite de la notation de somme (en substituant la valeur appropriée pour la variable d’indice), et nous l’ajoutons à notre somme.
La notation de la somme est également connue sous le nom de notation sigma parce que ce symbole élégant qui ressemble à un E est la version majuscule de la lettre grecque sigma.
Une notation similaire est utilisée lorsque nous prenons le produit d’une série de valeurs, sauf que nous utilisons le symbole , qui est la version majuscule de la lettre :
Notation du produit
1.4.2Notation des intervalles
À plusieurs reprises dans ce livre, nous faisons référence à un sous-ensemble de la droite des nombres réels en utilisant la notation des intervalles. La notation signifie « la portion de la droite numérique de à ». Ou, plus formellement, on peut lire comme « tous les nombres tels que ». Remarquez qu’il s’agit d’un intervalle fermé, ce qui signifie que les extrémités et sont incluses dans l’intervalle. Un intervalle ouvert est un intervalle dans lequel les extrémités sont exclues. Il est noté à l’aide de parenthèses au lieu de crochets : . Cet intervalle contient tous les tels que . Parfois un intervalle fermé est appelé inclusif et un intervalle ouvert est appelé exclusif.
Parfois, nous rencontrons des intervalles semi-ouverts, qui incluent une extrémité mais excluent l’autre. Ils sont notés avec une notation asymétrique5 telle que ou , le crochet carré étant placé à côté de l’extrémité incluse. Par convention, si une extrémité est infinie, nous considérons que cette extrémité est ouverte. Par exemple, l’ensemble de tous les nombres non négatifs est .
Notez que la notation peut désigner un intervalle ouvert ou un point 2D. De même, peut être un intervalle fermé ou un vecteur 2D (abordé dans le chapitre suivant). Le contexte précisera toujours de quoi il s’agit.
1.4.3Angles, degrés et radians
Un angle mesure une quantité de rotation dans le plan. Les variables représentant des angles se voient souvent attribuer la lettre grecque .6 Les unités de mesure les plus importantes utilisées pour spécifier les angles sont les degrés (°) et les radians (rad).
Les humains mesurent généralement les angles en degrés. Un degré mesure 1/360e d’un tour complet, donc représente un tour complet.7 Les mathématiciens, cependant, préfèrent mesurer les angles en radians, une unité de mesure basée sur les propriétés d’un cercle. Lorsque nous spécifions l’angle entre deux demi-droites en radians, nous mesurons en réalité la longueur de l’arc intercepté d’un cercle unité (un cercle centré à l’origine de rayon 1), comme illustré dans Figure 1.16.
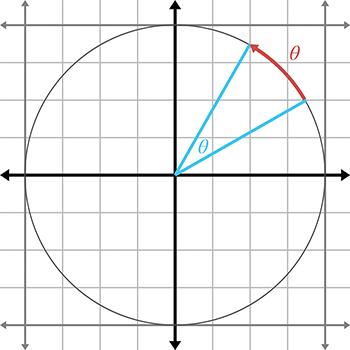
Figure 1.16Un radian mesure la longueur d’arc sur un cercle unité
La circonférence d’un cercle unité est , avec approximativement égal à . Par conséquent, radians représente un tour complet.
Puisque , . Pour convertir un angle de radians en degrés, on multiplie par , et pour convertir un angle de degrés en radians, on multiplie par . Ainsi,
Conversion entre radians et degrés
Dans la section suivante, Tableau 1.2 listera plusieurs angles en format degrés et radians.
1.4.4Fonctions trigonométriques
Il existe de nombreuses façons de définir les fonctions trigonométriques élémentaires. Dans cette section, nous les définissons à l’aide du cercle unité. En deux dimensions, si nous partons d’un rayon unitaire pointant vers , puis faisons tourner ce rayon dans le sens antihoraire d’un angle , nous avons tracé l’angle en position standard. (Si l’angle est négatif, faites tourner le rayon dans l’autre sens.) Cela est illustré dans Figure 1.17.
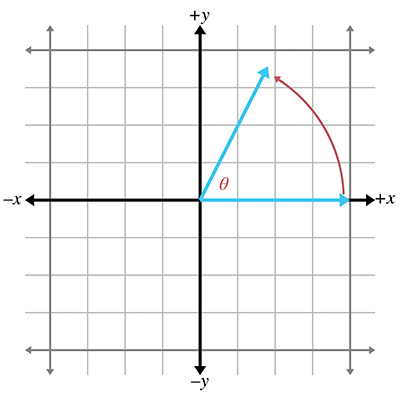
Figure 1.17Un angle en position standard
Les coordonnées de l’extrémité d’un rayon ainsi tourné ont des propriétés particulières et sont mathématiquement si significatives qu’on leur a attribué des fonctions spéciales, connues sous le nom de cosinus et sinus de l’angle :
Définir le sinus et le cosinus à l’aide du cercle unité
Vous pouvez facilement vous souvenir de laquelle est laquelle car elles sont dans l’ordre alphabétique : vient avant , et vient avant .
La sécante, la cosécante, la tangente et la cotangente sont également des fonctions trigonométriques utiles. Elles peuvent être définies en termes de sinus et de cosinus :
Si nous formons un triangle rectangle en utilisant le rayon tourné comme hypoténuse (le côté opposé à l’angle droit), nous voyons que et donnent les longueurs des cathètes (les côtés qui forment l’angle droit). La longueur du côté adjacent est , et la longueur du côté opposé est , les termes « adjacent » et « opposé » étant interprétés par rapport à l’angle . Là encore, l’ordre alphabétique est une aide mnémotechnique utile : « adjacent » et « opposé » sont dans le même ordre que « cosinus » et « sinus » correspondants. Utilisons les abréviations , et pour désigner respectivement les longueurs de l’hypoténuse, du côté adjacent et du côté opposé, comme illustré dans Figure 1.18.
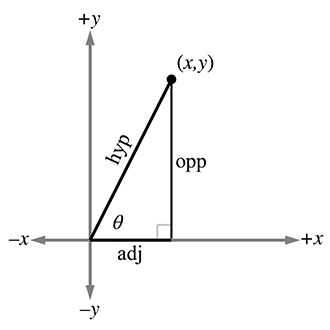
Figure 1.18L’hypoténuse et les côtés adjacent et opposé
Les fonctions trigonométriques primaires sont définies par les rapports suivants :
En raison des propriétés des triangles semblables, les équations ci-dessus s’appliquent même lorsque l’hypoténuse n’est pas de longueur unitaire. Cependant, elles ne s’appliquent pas lorsque est obtus, car nous ne pouvons pas former un triangle rectangle avec un angle intérieur obtus. Mais en représentant l’angle en position standard et en permettant au rayon tourné d’avoir n’importe quelle longueur (Figure 1.19), nous pouvons exprimer les rapports à l’aide de , et :
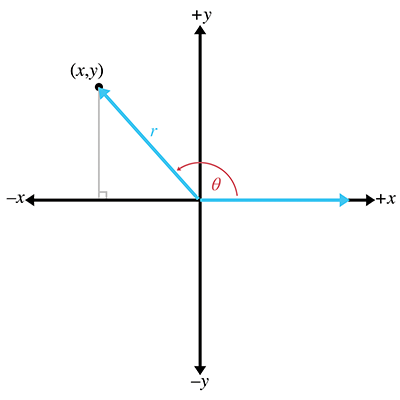
Figure 1.19 Une interprétation plus générale utilisant les coordonnées plutôt que les longueurs des côtés
Tableau 1.2 montre plusieurs angles différents, exprimés en degrés et en radians, ainsi que les valeurs de leurs principales fonctions trigonométriques.
Tableau 1.2Angles courants en degrés et en radians, et valeurs des principales fonctions trigonométriques
1.4.5Identités trigonométriques
Dans cette section, nous présentons un certain nombre de relations fondamentales entre les fonctions trigonométriques. Parce que nous supposons dans ce livre que le lecteur a une certaine exposition préalable à la trigonométrie, nous ne développons pas ni ne prouvons ces théorèmes. Les preuves peuvent être trouvées en ligne ou dans n’importe quel manuel de trigonométrie.
Un certain nombre d’identités peuvent être déduites à partir de la symétrie du cercle unité :
Identités de base liées à la symétrie
Peut-être l’identité la plus célèbre et la plus fondamentale concernant le triangle rectangle, que la plupart des lecteurs ont apprise à l’école primaire, est le théorème de Pythagore. Il énonce que la somme des carrés des deux cathètes d’un triangle rectangle est égale au carré de l’hypoténuse. Ou, plus célèbrement, comme montré dans Figure 1.20,
Théorème de Pythagore
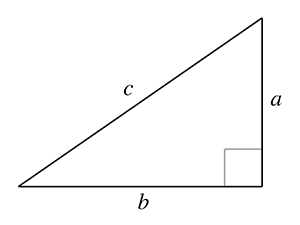
Figure 1.20Le théorème de Pythagore
En appliquant le théorème de Pythagore au cercle unité, on peut déduire les identités
Identités pythagoriciennes
Les identités suivantes concernent l’application d’une fonction trigonométrique à la somme ou à la différence de deux angles :
Identités de somme et de différence
Si nous appliquons les identités de somme au cas particulier où et sont égaux, nous obtenons les identités de l’angle double suivantes :
Identités de l’angle double
Nous avons souvent besoin de résoudre pour un côté inconnu ou un angle dans un triangle, en fonction des longueurs de côtés ou des angles connus. Pour ces types de problèmes, la loi des sinus et la loi des cosinus sont utiles. La formule à utiliser dépendra des valeurs connues et de la valeur inconnue. Figure 1.21 illustre la notation et montre que ces identités s’appliquent à tout triangle, pas seulement aux triangles rectangles :
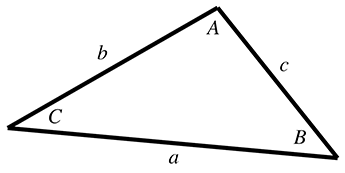
Figure 1.21Notation utilisée pour la loi des sinus et la loi des cosinus
Loi des sinus
Loi des cosinus
Exercices
Donnez les coordonnées des points suivants. Supposez les conventions 2D standard. Les lignes de grille plus sombres représentent une unité.
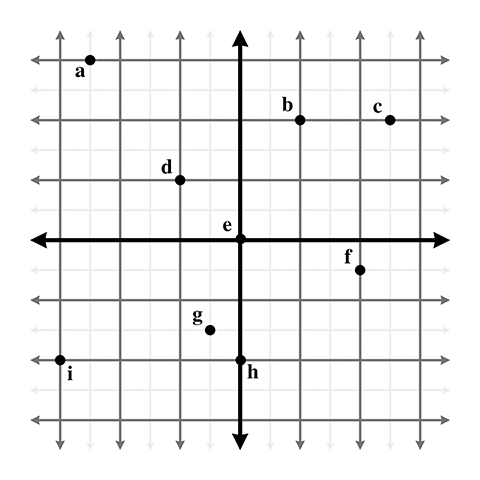
Donnez les coordonnées des points suivants :
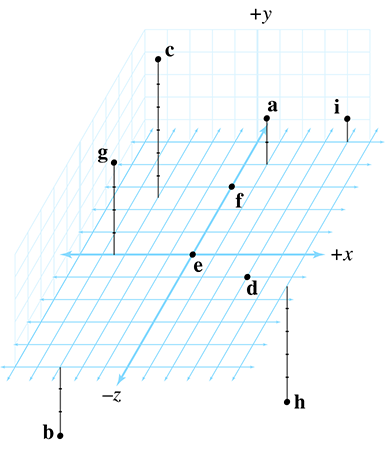
Listez les 48 façons différentes possibles d’assigner les axes 3D aux directions « nord », « est » et « haut ». Identifiez lesquelles de ces combinaisons sont main gauche, et lesquelles sont main droite.
Dans le célèbre logiciel de modélisation 3DS Max, l’orientation par défaut des axes est pointant vers la droite/est, pointant vers l’avant/nord et pointant vers le haut.
(a) S’agit-il d’un espace de coordonnées main gauche ou main droite ?
(b) Comment convertir des coordonnées 3D du système de coordonnées utilisé par 3DS Max en points utilisables avec nos conventions de coordonnées abordées dans Section 1.3.4 ?
(c) Et pour convertir de nos conventions vers les conventions de 3DS Max ?
Une convention courante dans l’aérospatiale est que pointe vers l’avant/nord, pointe vers la droite/est et pointe vers le bas.
(a) S’agit-il d’un espace de coordonnées main gauche ou main droite ?
(b) Comment convertir des coordonnées 3D depuis ces conventions aérospatiales vers nos conventions ?
(c) Et pour convertir de nos conventions vers les conventions aérospatiales ?
Dans un système de coordonnées main gauche :
(a) en regardant depuis l’extrémité positive d’un axe de rotation, la rotation positive est-elle horaire (H) ou antihoraire (AH) ?
(b) en regardant depuis l’extrémité négative d’un axe de rotation, la rotation positive est-elle H ou AH ?
Dans un système de coordonnées main droite :
(c) en regardant depuis l’extrémité positive d’un axe de rotation, la rotation positive est-elle H ou AH ?
(d) en regardant depuis l’extrémité négative d’un axe de rotation, la rotation positive est-elle H ou AH ?
Calculez les expressions suivantes : (a) (b) (c) (d) (e)8
Convertissez de degrés en radians :
(a) (b) (c) (d) (e) (f) (g) (h) (i) (j) Convertissez de radians en degrés :
(a) (b) (c) (d) (e) (f) (g) (h) (i) (j) Dans Le Magicien d’Oz, l’épouvantail reçoit son diplôme du sorcier et débite cette version tordue du théorème de Pythagore :
La somme des racines carrées de deux côtés quelconques d’un triangle isocèle est égale à la racine carrée du côté restant.
Apparemment le diplôme de l’épouvantail ne valait pas grand-chose, car cette « preuve qu’il avait un cerveau » est en réalité fausse d’au moins deux façons.9 Qu’aurait dû dire l’épouvantail ?
Confirmez les identités suivantes :
(a)
(b)
(c)
(d)
Personnes, lieux, sciences, divers et variés, et choses que vous auriez dû apprendre à l’école si vous aviez été attentif.
— Catégories de l’émission de radio du week-end de Michael Feldman Whaddya know?
Cette phrase fonctionne quel que soit le sport auquel vous pensez en lisant le mot « football ». Enfin, disons que ça marche un peu mieux avec le football américain en raison des lignes de yard clairement marquées.
Il vous faudra peut-être poser le livre.
Cela peut nécessiter une certaine dextérité. Les auteurs conseillent de ne pas faire cela en public sans s’y être entraîné en privé au préalable, pour ne pas offenser les passants innocents.
C’est dû à une symétrie fascinante et surprenante dans la nature. On pourrait dire que la nature ne sait pas si nous utilisons des coordonnées main gauche ou main droite. Il y a une discussion vraiment intéressante dans The Feynman Lectures on Physics sur la façon dont il est impossible sans une physique très avancée de décrire les concepts de « gauche » ou de « droite » à quelqu’un sans faire référence à un objet que vous avez tous les deux vu.
Et déroutant pour la fonctionnalité de correspondance des délimiteurs de votre éditeur de texte.
Un prérequis que nous ne supposons pas dans ce livre est la familiarité avec l’alphabet grec. Le symbole est le thêta minuscule, prononcé « THAY-tuh ».
Le nombre 360 est un choix relativement arbitraire, qui pourrait avoir son origine dans les calendriers primitifs, comme le calendrier perse, qui divisait l’année en 360 jours. Cette erreur n’a jamais été corrigée à 365 car le nombre 360 est tellement pratique. Le nombre 360 a pas moins de 22 diviseurs (sans compter lui-même et 1) : 2, 3, 4, 5, 6, 8, 9, 10, 12, 15, 18, 20, 24, 30, 36, 40, 45, 60, 72, 90, 120 et 180. Cela signifie que 360 peut être divisé de manière exacte dans un grand nombre de cas sans avoir besoin de fractions, ce qui était apparemment un avantage pour les civilisations anciennes. Dès 1750 av. J.-C., les Babyloniens avaient élaboré un système de numération sexagésimal (en base 60). Le nombre 360 est également assez grand pour que la précision au degré entier le plus proche soit suffisante dans de nombreuses circonstances.
Il existe une histoire bien connue sur le mathématicien Karl Friedrich Gauss résolvant ce problème en seulement quelques secondes alors qu’il était élève à l’école primaire. Selon l’histoire, son instituteur voulait occuper les élèves en leur demandant d’additionner les nombres de 1 à 100 et de remettre leurs réponses à la fin du cours. Cependant, quelques secondes à peine après avoir reçu ce devoir, Gauss remit la bonne réponse à son instituteur tandis que celui-ci et le reste de la classe regardaient avec stupéfaction le jeune Gauss.
Homer Simpson répéta les mêmes bêtises après avoir enfilé une paire de lunettes trouvée dans des toilettes. Un homme dans une cabine voisine le corrigea sur l’une de ses erreurs. Donc si vous avez vu cet épisode des Simpsons, vous avez une longueur d’avance sur cette question, mais pas la réponse complète.
Retour en haut