<< Systèmes de coordonnées cartésiennes
Espaces de coordonnées multiples >>
Chapitre 2
Vecteurs
Yellow fever vaccine should be administered
10 to 12 days before exposure to the vector.
— The United States Dispensatory (1978)
Les vecteurs sont les entités mathématiques formelles que nous utilisons pour faire des mathématiques en 2D et 3D. Le mot vecteur a deux significations distinctes mais liées. Les livres de mathématiques, en particulier ceux sur l’algèbre linéaire, tendent à se concentrer sur une définition assez abstraite, s’intéressant aux nombres d’un vecteur mais pas nécessairement au contexte ou à la signification réelle de ces nombres. Les livres de physique, en revanche, ont tendance à adopter une interprétation qui traite un vecteur comme une entité géométrique, au point qu’ils évitent toute mention des coordonnées utilisées pour mesurer le vecteur, lorsque c’est possible. Il n’est pas étonnant que l’on puisse parfois trouver des personnes de ces deux disciplines se corrigeant mutuellement sur les subtilités de « comment les vecteurs fonctionnent vraiment ». Bien sûr, la réalité est qu’ils ont tous les deux raison,1 et pour maîtriser les mathématiques 3D, nous devons comprendre les deux interprétations des vecteurs et comment elles sont liées.
Ce chapitre introduit le concept de vecteur. Il est divisé en les sections suivantes.
La Section 2.1 couvre quelques propriétés mathématiques de base des vecteurs.
La Section 2.2 donne une introduction générale aux propriétés géométriques des vecteurs.
La Section 2.3 relie la définition mathématique à la définition géométrique et explique comment les vecteurs fonctionnent dans le cadre des coordonnées cartésiennes.
La Section 2.4 aborde la relation souvent déroutante entre les points et les vecteurs, et examine la question plutôt philosophique de pourquoi il est si difficile de faire des mesures absolues.
Les sections 2.5–2.12 traitent des calculs fondamentaux que nous pouvons effectuer avec des vecteurs, en considérant à la fois l’algèbre et les interprétations géométriques de chaque opération.
La Section 2.13 présente une liste d’identités utiles en algèbre vectorielle.
2.1Définition mathématique d’un vecteur,
et autres considérations rébarbatives
Pour les mathématiciens, un vecteur est une liste de nombres. Les programmeurs reconnaîtront le terme synonyme tableau (array). Notez que la classe template STL pour les tableaux en C++ est nommée vector, et la classe de base Java pour les tableaux est java.util.Vector. Donc mathématiquement, un vecteur n’est rien d’autre qu’un tableau de nombres.
Bâillement… Si cette définition abstraite d’un vecteur ne vous inspire pas, ne vous inquiétez pas. Comme dans de nombreux domaines mathématiques, nous devons d’abord introduire quelques termes et notations avant de passer aux « choses intéressantes ».
Les mathématiciens distinguent les quantités vectorielles des quantités scalaires (prononcé « ska-lèr »). Vous êtes déjà expert en scalaires — scalaire est le terme technique pour un nombre ordinaire. Nous utilisons ce terme spécifiquement lorsque nous voulons souligner qu’une quantité particulière n’est pas une quantité vectorielle. Par exemple, comme nous allons le voir, « vélocité » et « déplacement » sont des quantités vectorielles, tandis que « vitesse » et « distance » sont des quantités scalaires.
La dimension d’un vecteur indique combien de nombres le vecteur contient. Les vecteurs peuvent avoir n’importe quelle dimension positive, y compris un. En fait, un scalaire peut être considéré comme un vecteur 1D. Dans ce livre, nous nous intéressons principalement aux vecteurs 2D, 3D et (plus tard) 4D.
Pour écrire un vecteur, les mathématiciens listent les nombres entre crochets, par exemple, . Lorsqu’on écrit un vecteur dans le corps d’un paragraphe, on met généralement des virgules entre les nombres. Lorsqu’on l’écrit dans une équation, les virgules sont souvent omises. Dans les deux cas, un vecteur écrit horizontalement est appelé un vecteur ligne. Les vecteurs sont aussi fréquemment écrits verticalement :
Un vecteur colonne 3D
Un vecteur écrit verticalement est appelé un vecteur colonne. Ce livre utilise les deux notations. Pour l’instant, la distinction entre vecteurs ligne et vecteurs colonne n’a pas d’importance. Cependant, à la Section 4.1.7 nous expliquons pourquoi dans certaines circonstances cette distinction est cruciale.
Lorsque nous voulons faire référence aux composantes individuelles d’un vecteur, nous utilisons la notation indicielle. Dans la littérature mathématique, des indices entiers sont utilisés pour accéder aux éléments. Par exemple fait référence au premier élément de . Cependant, nous nous intéressons spécifiquement aux vecteurs 2D, 3D et 4D plutôt qu’aux vecteurs de dimension arbitraire , donc nous utilisons rarement cette notation. À la place, nous utilisons et pour les éléments d’un vecteur 2D ; , et pour les éléments d’un vecteur 3D ; et , , et pour les éléments d’un vecteur 4D. Cette notation est illustrée dans l’Équation (2.1).
Notation indicielle des vecteurs
Notez que les composantes d’un vecteur 4D ne sont pas dans l’ordre alphabétique. La quatrième valeur est . (Il n’y avait plus de lettres dans l’alphabet !)
Parlons maintenant de quelques conventions typographiques importantes utilisées dans ce livre. Comme vous le savez, les variables sont des symboles servant à représenter des quantités inconnues. En mathématiques 3D, nous travaillons avec des quantités scalaires, vectorielles et (plus tard) matricielles. De la même façon qu’il est important dans un programme C++ ou Java de spécifier le type de données stocké par une variable, il est important, lorsqu’on travaille avec des vecteurs, d’indiquer clairement quel type de données est représenté par une variable particulière. Dans ce livre, nous utilisons des polices différentes pour les variables de types différents :
Les variables scalaires sont représentées par des lettres romaines ou grecques minuscules en italique : , , , , , , , , .
Les variables vectorielles de n’importe quelle dimension sont représentées par des lettres minuscules en gras : , , , , , .
Les variables matricielles sont représentées par des lettres majuscules en gras : , , , .
Notez que d’autres auteurs peuvent utiliser des conventions différentes. Une convention courante, fréquemment utilisée lors de l’écriture manuscrite des vecteurs, est de tracer une flèche au-dessus du vecteur, par exemple .
Avant d’aller plus loin, un peu de contexte s’impose concernant la perspective que nous adoptons sur les vecteurs. La branche des mathématiques qui traite principalement des vecteurs et des matrices est appelée algèbre linéaire, un sujet qui part de la définition abstraite donnée précédemment : un vecteur est un tableau de nombres. Cette approche très générale permet d’explorer un large ensemble de problèmes mathématiques. En algèbre linéaire, les vecteurs et matrices de dimension sont utilisés pour résoudre un système de équations linéaires à inconnues, sans se soucier de la signification physique éventuelle des nombres. C’est certainement une étude fascinante et très pratique, mais ce n’est pas notre principal intérêt dans l’étude des mathématiques 3D. Pour les mathématiques 3D, nous nous intéressons surtout aux interprétations géométriques des vecteurs et des opérations vectorielles.
Notre approche est géométrique, donc nous omettons de nombreux détails et concepts de l’algèbre linéaire qui ne contribuent pas à notre compréhension de la géométrie 2D ou 3D. Même si nous abordons occasionnellement des propriétés ou opérations sur des vecteurs de dimension arbitraire , nous nous concentrerons habituellement sur les vecteurs et matrices 2D, 3D et (plus tard) 4D. Même lorsque les nombres dans un vecteur n’ont pas de signification physique, la capacité à visualiser les opérations d’algèbre linéaire est utile, donc apprendre à interpréter géométriquement les opérations est utile même dans les applications non physiques. Plus de contexte sur la façon dont les sujets de ce livre s’inscrivent dans l’algèbre linéaire au sens large peut être trouvé à la Section 4.3.
2.2Définition géométrique d’un vecteur
Maintenant que nous avons vu ce qu’est un vecteur mathématiquement, examinons une interprétation plus géométrique des vecteurs. Géométriquement parlant, un vecteur est un segment de droite orienté qui possède une norme et une direction.
La norme d’un vecteur est la longueur du vecteur. Un vecteur peut avoir n’importe quelle longueur non négative.
La direction d’un vecteur décrit vers où le vecteur pointe dans l’espace. Notez que « direction » n’est pas exactement la même chose qu’« orientation », une distinction que nous réexaminerons à la Section 8.1.
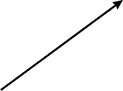 Figure 2.1Un vecteur 2D
Figure 2.1Un vecteur 2D
Regardons un vecteur. La Figure 2.1 montre une illustration d’un vecteur en 2D.
Ça ressemble à une flèche, non ? C’est la façon standard de représenter graphiquement un vecteur, car les deux caractéristiques définissantes d’un vecteur sont capturées : sa norme et sa direction.
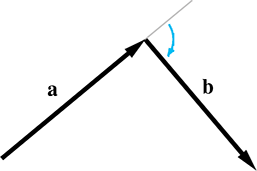
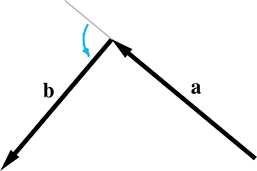
Nous faisons parfois référence à la tête et à la queue d’un vecteur. Comme illustré à la Figure 2.2, la tête est l’extrémité du vecteur avec la pointe de flèche (là où le vecteur « se termine »), et la queue est l’autre extrémité (là où le vecteur « commence »).
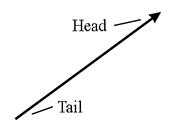
Figure 2.2Un vecteur a une tête et une queue
Où se trouve ce vecteur ? En fait, ce n’est pas une question appropriée. Les vecteurs n’ont pas de position, seulement une norme et une direction. Cela peut sembler impossible, mais de nombreuses quantités que nous manipulons au quotidien ont une norme et une direction, mais pas de position. Considérez comment les deux affirmations ci-dessous peuvent avoir du sens, quel que soit l’endroit où elles sont appliquées.
Déplacement. « Faites trois pas en avant. » Cette phrase semble entièrement liée à des positions, mais la quantité réellement utilisée est un déplacement relatif et n’a pas de position absolue. Ce déplacement relatif consiste en une norme (3 pas) et une direction (en avant), donc il peut être représenté par un vecteur.
Vitesse. « Je me dirige vers le nord-est à 80 km/h. » Cette phrase décrit une quantité qui a une norme (80 km/h) et une direction (nord-est), mais pas de position. Le concept de « nord-est à 80 km/h » peut être représenté par un vecteur.
Remarquez que déplacement et vitesse (vecteur) sont techniquement différents des termes distance et rapidité (scalaire). Le déplacement et la vitesse sont des quantités vectorielles et impliquent donc une direction, tandis que la distance et la rapidité sont des quantités scalaires qui ne spécifient pas de direction. Plus précisément, la quantité scalaire distance est la norme de la quantité vectorielle déplacement, et la quantité scalaire rapidité est la norme de la quantité vectorielle vitesse.
Parce que les vecteurs sont utilisés pour exprimer des déplacements et des différences relatives entre des choses, ils peuvent décrire des positions relatives. (« Ma maison est à 3 rues à l’est d’ici. ») Cependant, vous ne devez pas penser qu’un vecteur a lui-même une position absolue ; rappelez-vous qu’il décrit le déplacement d’une position à une autre, dans ce cas de « ici » à « ma maison ». (Plus sur la position relative et absolue à la Section 2.4.1.) Pour aider à intégrer cela, quand vous imaginez un vecteur, visualisez une flèche. Rappelez-vous que la longueur et la direction de cette flèche sont importantes, mais pas sa position.
Puisque les vecteurs n’ont pas de position, nous pouvons les représenter sur un diagramme où nous voulons, à condition que la longueur et la direction du vecteur soient correctement représentées. Nous utilisons souvent ce fait à notre avantage en déplaçant le vecteur vers un emplacement significatif sur un diagramme.
Maintenant que nous avons une vue d’ensemble des vecteurs d’un point de vue mathématique et géométrique, apprenons à travailler avec des vecteurs dans le système de coordonnées cartésiennes.
2.3Représenter les vecteurs en coordonnées cartésiennes
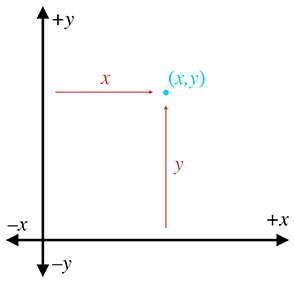
Lorsque nous utilisons des coordonnées cartésiennes pour décrire des vecteurs, chaque coordonnée mesure un déplacement signé dans la dimension correspondante. Par exemple, en 2D, nous indiquons le déplacement parallèle à l’axe et le déplacement parallèle à l’axe , comme illustré à la Figure 2.3.
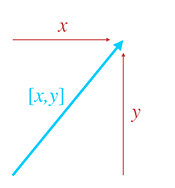
Figure 2.3 Les vecteurs sont spécifiés en donnant le déplacement signé dans chaque dimension.
La Figure 2.4 montre plusieurs vecteurs 2D et leurs valeurs. Notez que la position de chaque vecteur sur le diagramme est sans importance. (Les axes sont volontairement absents pour souligner ce fait, bien que nous supposions la convention standard selon laquelle pointe vers la droite et pointe vers le haut.) Par exemple, deux des vecteurs de la Figure 2.4 ont la valeur , mais ils ne se trouvent pas au même endroit sur le diagramme.
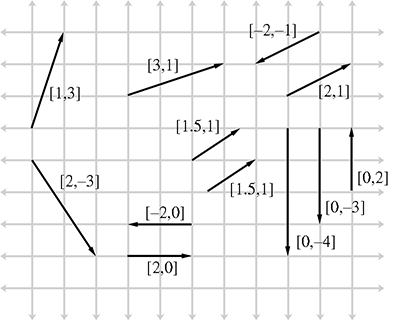
Figure 2.4 Exemples de vecteurs 2D et leurs valeurs
Les vecteurs 3D sont une simple extension des vecteurs 2D. Un vecteur 3D contient trois nombres qui mesurent les déplacements signés dans les directions , et , comme on pourrait s’y attendre.
Nous nous concentrons sur les coordonnées cartésiennes pour l’instant, mais ce n’est pas la seule façon de décrire mathématiquement des vecteurs. Les coordonnées polaires sont aussi courantes, en particulier dans les manuels de physique. Les coordonnées polaires sont le sujet du Chapitre 7.
2.3.1Un vecteur comme suite de déplacements
Une façon utile de penser au déplacement décrit par un vecteur est de décomposer le vecteur en ses composantes alignées sur les axes. Lorsque ces déplacements alignés sur les axes sont combinés, ils définissent cumulativement le déplacement défini par le vecteur dans son ensemble.
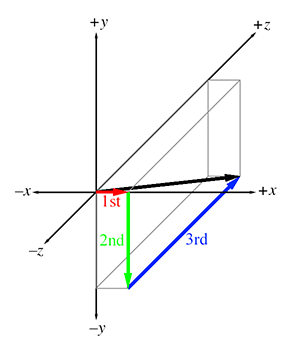
Figure 2.5 Interpréter un vecteur comme une suite de déplacements
Par exemple, le vecteur 3D représente un déplacement unique, mais nous pouvons visualiser ce déplacement comme un mouvement de 1 unité vers la droite, 3 unités vers le bas, puis 4 unités vers l’avant. (En supposant notre convention selon laquelle , et +z pointent respectivement vers la droite, le haut et l’avant. Notez également que nous ne « tournons » pas entre les étapes, donc « vers l’avant » est toujours parallèle à .) Ce déplacement est illustré à la Figure 2.5.
L’ordre dans lequel nous effectuons les étapes n’a pas d’importance ; nous pourrions avancer de 4 unités, descendre de 3 unités, puis aller 1 unité vers la droite, et nous aurions un déplacement total identique. Les différents ordres correspondent à différents chemins le long de la boîte englobante alignée sur les axes contenant le vecteur. La Section 2.7.2 vérifie mathématiquement cette intuition géométrique.
2.3.2Le vecteur nul
Pour toute dimension vectorielle donnée, il existe un vecteur spécial, appelé le vecteur nul, qui a des zéros à chaque position. Par exemple, le vecteur nul 3D est . Nous notons le vecteur nul de n’importe quelle dimension avec un zéro en gras : . En d’autres termes,
Le vecteur nul
Le vecteur nul est spécial parce que c’est le seul vecteur de norme nulle. Tous les autres vecteurs ont une norme positive. Le vecteur nul est également unique parce que c’est le seul vecteur qui n’a pas de direction.
Puisque le vecteur nul n’a ni direction ni longueur, nous ne le représentons pas comme une flèche comme nous le faisons pour les autres vecteurs. À la place, nous représentons le vecteur nul comme un point. Mais ne vous laissez pas tromper au point de penser au vecteur nul comme à un « point », car un vecteur ne définit pas un emplacement. Pensez plutôt au vecteur nul comme à une façon d’exprimer le concept de « aucun déplacement », tout comme le zéro scalaire représente le concept de « aucune quantité ».
Comme le zéro scalaire que vous connaissez, le vecteur nul d’une dimension donnée est l’élément neutre de l’addition pour l’ensemble des vecteurs de cette dimension. Essayez de vous remémorer votre cours d’algèbre, et retrouvez dans les profondeurs de votre mémoire le concept d’élément neutre de l’addition : pour tout ensemble d’éléments, l’élément neutre de l’addition est l’élément tel que pour tout de l’ensemble, .2 Autrement dit, lorsque nous ajoutons le vecteur nul à n’importe quel autre vecteur, nous obtenons ce vecteur : . La Section 2.7 traite de l’addition vectorielle.
2.4Vecteurs et points
Rappelons qu’un « point » a un emplacement mais pas de taille ou d’épaisseur réelle. Dans ce chapitre, nous avons appris qu’un « vecteur » a une norme et une direction, mais pas de position. Donc « points » et « vecteurs » ont des rôles conceptuellement différents : un « point » spécifie une position, et un « vecteur » spécifie un déplacement.
Mais examinez maintenant la Figure 2.6, qui compare une illustration du Chapitre 1 (Figure 1.8), montrant comment les points 2D sont localisés, avec une figure de plus tôt dans ce chapitre (Figure 2.3), montrant comment les vecteurs 2D sont spécifiés. Il semble qu’il y ait une forte relation entre les points et les vecteurs. Cette section examine cette relation importante.
 |
|
|---|
Figure 2.6Localiser des points versus spécifier des vecteurs
2.4.1Position relative
La Section 2.2 a évoqué le fait que, parce que les vecteurs peuvent décrire des déplacements, ils peuvent décrire des positions relatives. L’idée d’une position relative est assez simple : la position de quelque chose est spécifiée en décrivant où elle se trouve par rapport à un autre emplacement connu.
Cela soulève les questions suivantes : Où sont ces emplacements « connus » ? Qu’est-ce qu’une position « absolue » ? Il est surprenant de réaliser qu’une telle chose n’existe pas ! Toute tentative de décrire une position nécessite de la décrire par rapport à autre chose. Toute description d’une position n’a de sens que dans le contexte d’un référentiel (typiquement « plus grand »). Théoriquement, nous pourrions établir un référentiel englobant tout ce qui existe et choisir un point comme « origine » de cet espace, définissant ainsi l’espace de coordonnées « absolu ». Cependant, même si un tel espace de coordonnées absolu était possible, il ne serait pas pratique. Heureusement pour nous, les positions absolues dans l’univers n’ont pas d’importance. Connaissez-vous votre position précise dans l’univers en ce moment ? Nous ne connaissons pas non plus la nôtre.3
2.4.2La relation entre les points et les vecteurs
Les vecteurs sont utilisés pour décrire des déplacements, et donc ils peuvent décrire des positions relatives. Les points sont utilisés pour spécifier des positions. Mais nous venons d’établir à la Section 2.4.1 que toute méthode de spécification d’une position doit être relative. Donc, nous devons conclure que les points sont également relatifs — ils sont relatifs à l’origine du système de coordonnées utilisé pour spécifier leurs coordonnées. Cela nous amène à la relation entre les points et les vecteurs.
La Figure 2.7 illustre comment le point est lié au vecteur , pour des valeurs arbitraires de et .
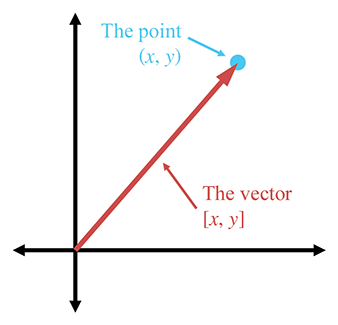
Figure 2.7 La relation entre les points et les vecteurs
Comme vous pouvez le voir, si nous partons de l’origine et nous déplaçons de la quantité spécifiée par le vecteur , nous arriverons à l’emplacement décrit par le point . Une autre façon de dire cela est que le vecteur donne le déplacement de l’origine jusqu’au point .
Cela peut sembler évident, mais il est important de comprendre que les points et les vecteurs sont conceptuellement distincts, mais mathématiquement équivalents. Cette confusion entre « points » et « vecteurs » peut être un obstacle pour les débutants, mais cela ne devrait pas être un problème pour vous. Quand vous pensez à un emplacement, pensez à un point et visualisez un point. Quand vous pensez à un déplacement, pensez à un vecteur et visualisez une flèche.
Dans de nombreux cas, les déplacements partent de l’origine, et la distinction entre points et vecteurs sera donc ténue. Cependant, nous avons souvent affaire à des quantités qui ne sont pas relatives à l’origine, ni à aucun autre point. Dans ces cas, il est important de visualiser ces quantités comme une flèche plutôt que comme un point.
Les mathématiques que nous développons dans les sections suivantes opèrent sur des « vecteurs » plutôt que sur des « points ». Gardez à l’esprit que tout point peut être représenté comme un vecteur depuis l’origine.
En fait, c’est le bon moment pour vous prévenir que beaucoup de personnes adoptent une position bien plus ferme sur ce sujet et n’approuveraient pas notre attitude cavalière consistant à traiter vecteurs et points comme des égaux mathématiques.4 Ces puristes vous diront, par exemple, que si vous pouvez additionner deux vecteurs (donnant un troisième vecteur), et additionner un vecteur et un point (donnant un point), vous ne pouvez pas additionner deux points ensemble. Nous admettons qu’il y a une certaine valeur à comprendre ces distinctions dans certaines circonstances. Cependant, nous avons constaté que, en particulier lorsqu’on écrit du code opérant sur des points et des vecteurs, le respect de cette éthique aboutit à des programmes presque toujours plus longs et jamais plus rapides.5 Que cela rende le code plus propre ou plus facile à comprendre est une question très subjective. Bien que ce livre n’utilise pas de notations différentes pour les points et les vecteurs, en général il sera évident si une quantité est un point ou un vecteur. Nous avons essayé d’éviter de présenter des résultats avec des vecteurs et des points mélangés de façon inappropriée, mais pour toutes les étapes intermédiaires, nous n’avons peut-être pas été tout à fait aussi scrupuleux.
2.4.3Tout est relatif
Avant de passer aux opérations vectorielles, prenons une brève pause philosophique. La position spatiale n’est pas le seul aspect de notre monde pour lequel nous avons du mal à établir une référence « absolue », et nous utilisons donc des mesures relatives. Il en va de même pour la température, le volume sonore et la vitesse.
Température. L’une des premières tentatives d’établir une échelle de température standard eut lieu vers l’an 170, lorsque Galien proposa une température « neutre » standard composée de quantités égales d’eau bouillante et de glace. De part et d’autre de cette température se trouvaient quatre degrés de « plus chaud » et quatre degrés de « plus froid ». Cela semble assez primitif, n’est-ce pas ? En 1724, Gabriel Fahrenheit suggéra un système un peu plus précis. Il proposa d’utiliser le mercure comme liquide dans un thermomètre et calibra son échelle à l’aide de deux points de référence : le point de congélation de l’eau et la température d’un être humain en bonne santé. Il appela son échelle l’échelle Fahrenheit, et les mesures étaient en °F. En 1745, Carolus Linnaeus d’Uppsala, Suède, suggéra que les choses seraient plus simples si l’échelle allait de 0 (au point de congélation de l’eau) à 100 (point d’ébullition de l’eau), et appela cette échelle l’échelle centigrade. (Cette échelle fut abandonnée par la suite au profit de l’échelle Celsius, qui est techniquement différente du centigrade de façons subtiles sans importance ici.) Notez que toutes ces échelles sont relatives — elles sont basées sur le point de congélation de l’eau, qui est un point de référence arbitraire (mais très pratique). Une lecture de température de C signifie essentiellement « degrés plus chaud que la température à laquelle l’eau gèle ». Ce n’est qu’en 1848, avec l’invention de l’échelle Kelvin par Lord Kelvin, que l’humanité disposait enfin d’une échelle de température absolue. 0 K est la température la plus froide possible, correspondant à C.
Volume sonore. Le volume sonore est généralement mesuré en décibels (abrégé dB). Plus précisément, les décibels sont utilisés pour mesurer le rapport de deux niveaux de puissance. Si nous avons deux niveaux de puissance et , alors la différence en décibels entre les deux niveaux de puissance est
Ainsi, si est environ deux fois le niveau de , la différence est d’environ 3 dB. Notez qu’il s’agit d’un système relatif, fournissant un moyen précis de mesurer la force relative de deux niveaux de puissance, mais pas un moyen d’assigner un nombre à un seul niveau de puissance. En d’autres termes, nous n’avons établi aucun point de référence absolu. (C’est aussi une échelle logarithmique, mais ce n’est pas important ici.) Vous avez peut-être utilisé une table de mixage, un bouton de volume, ou un programme audio numérique qui mesure le volume en dB. Normalement, il y a un point arbitraire marqué 0 dB, et la plupart des lectures ont des valeurs négatives. En d’autres termes, 0 dB est le volume maximum, et tous les autres réglages de volume sont plus doux.
Aucune de ces valeurs n’est absolue — mais comment pourrait-il en être autrement ? Comment votre programme audio numérique pourrait-il connaître le volume absolu que vous allez entendre, qui dépend non seulement des données audio, mais aussi du réglage du volume sur votre ordinateur, du bouton de volume sur votre amplificateur, de la puissance fournie par l’amplificateur à vos haut-parleurs, de la distance à laquelle vous êtes des haut-parleurs, etc.
Parfois, les gens décrivent le niveau sonore en termes de décibels « absolus ». Suivant les traces de Gabriel Fahrenheit, cette échelle utilise un point de référence basé sur le corps humain. Les valeurs « absolues » en dB sont en réalité relatives au seuil d’audition d’un être humain normal.6 De ce fait, il est possible d’obtenir une lecture « absolue » en dB qui soit négative. Cela signifie simplement que l’intensité est en dessous du seuil auquel la plupart des gens sont capables d’entendre.
À ce stade, nous devrions mentionner qu’il existe un moyen de concevoir une échelle absolue pour le volume sonore, en mesurant une quantité physique telle que la pression, l’énergie ou la puissance, qui ont toutes une valeur minimale absolue de zéro. Le fait est que ces systèmes absolus ne sont pas utilisés dans de nombreux cas — le système relatif est celui qui est le plus utile.
Vitesse. À quelle vitesse vous déplacez-vous en ce moment ? Peut-être êtes-vous assis dans un fauteuil confortable, et diriez-vous que votre vitesse est nulle. Peut-être êtes-vous en voiture et diriez-vous quelque chose comme 100 km/h. (J’espère que quelqu’un d’autre conduit !) En réalité, vous foncer à travers l’espace à presque 30 km par seconde ! C’est à peu près la vitesse à laquelle la Terre se déplace pour parcourir les 939 millions de kilomètres autour du Soleil chaque année. Bien sûr, même cette vitesse est relative au Soleil. Notre système solaire se déplace au sein de la galaxie Voie lactée. Alors quelle est notre vitesse réelle, en termes absolus ? Galilée nous a dit au XVIIe siècle que cette question n’a pas de réponse — toute vitesse est relative.
Notre difficulté à établir une vitesse absolue est similaire à la difficulté d’établir une position. Après tout, la vitesse est un déplacement (différence entre positions) par unité de temps. Pour établir une vitesse absolue, nous aurions besoin d’un emplacement de référence qui « resterait immobile » afin de pouvoir mesurer notre déplacement depuis cet emplacement. Malheureusement, tout dans notre univers semble orbiter autour de quelque chose d’autre.
2.5Opposé d’un vecteur
Les sections précédentes ont donné une vue d’ensemble des vecteurs. Le reste de ce chapitre examine des opérations mathématiques spécifiques que nous effectuons sur les vecteurs. Pour chaque opération, nous définissons d’abord les règles mathématiques pour effectuer l’opération, puis nous décrivons les interprétations géométriques de l’opération et donnons quelques utilisations pratiques.
La première opération que nous voulons examiner est celle de l’opposé d’un vecteur. En parlant du vecteur nul, nous vous avons demandé de vous souvenir de la théorie des groupes et de la notion d’élément neutre de l’addition. Retournez là où vous avez trouvé l’élément neutre de l’addition dans votre mémoire, peut-être entre les coussins métaphoriques du canapé, ou au fond d’une boîte pleine de vieilles déclarations d’impôts. Tout près, vous trouverez probablement un concept tout aussi oublié, évident au point d’être inutile : l’inverse additif. Dépoussiérons-le. Pour tout groupe, l’inverse additif de , noté , est l’élément qui donne l’élément neutre (zéro) lorsqu’il est additionné à . En bref, . Une autre façon de dire cela est que les éléments du groupe peuvent être opposés.
L’opération d’opposé peut être appliquée aux vecteurs. Tout vecteur a un inverse additif de même dimension que tel que . (Nous apprendrons comment additionner des vecteurs à la Section 2.7.)
2.5.1Règles officielles d’algèbre linéaire
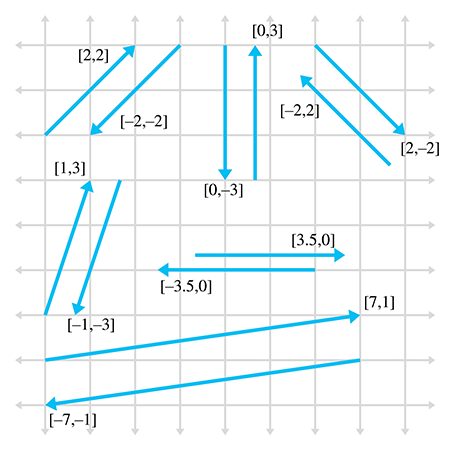
Figure 2.8 Exemples de vecteurs et de leurs opposés. Notez qu’un vecteur et son opposé sont parallèles et ont la même norme, mais pointent dans des directions opposées.
Pour prendre l’opposé d’un vecteur de n’importe quelle dimension, nous prenons simplement l’opposé de chaque composante du vecteur. Formellement,
Opposé d’un vecteur
En appliquant cela aux cas spécifiques des vecteurs 2D, 3D et 4D, nous avons
Opposé de vecteurs 2D, 3D et 4D
Quelques exemples :
2.5.2Interprétation géométrique
Prendre l’opposé d’un vecteur donne un vecteur de même norme mais de direction opposée, comme illustré à la Figure 2.8.
Rappelons que la position d’un vecteur sur un diagramme est sans importance — seules la norme et la direction comptent.
2.6Multiplication d’un vecteur par un scalaire
Bien que nous ne puissions pas additionner un vecteur et un scalaire, nous pouvons multiplier un vecteur par un scalaire. Le résultat est un vecteur parallèle au vecteur original, avec une longueur différente et éventuellement une direction opposée.
2.6.1Règles officielles d’algèbre linéaire
La multiplication vecteur-scalaire est directe : nous multiplions simplement chaque composante du vecteur par le scalaire. Formellement,
Multiplication d’un vecteur par un scalaire
En appliquant cette règle aux vecteurs 3D, à titre d’exemple, nous obtenons
Multiplication d’un vecteur 3D par un scalaire
Bien que le scalaire et le vecteur puissent être écrits dans n’importe quel ordre, la plupart des gens choisissent de mettre le scalaire à gauche, en préférant à .
Un vecteur peut également être divisé par un scalaire non nul. Cela revient à multiplier par l’inverse du scalaire :
Division d’un vecteur 3D par un scalaire
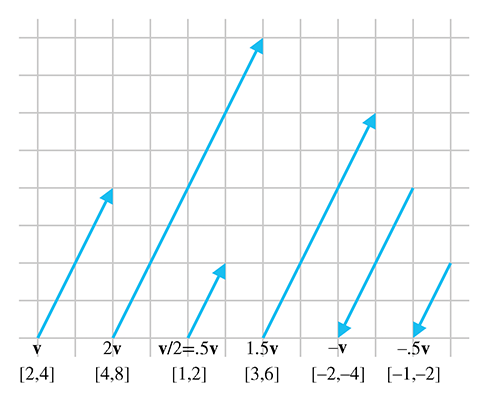
Figure 2.9Un vecteur 2D multiplié par différents scalaires
Quelques exemples :
Voici quelques remarques sur la multiplication d’un vecteur par un scalaire :
Lorsque nous multiplions un vecteur par un scalaire, nous n’utilisons aucun symbole de multiplication. La multiplication est indiquée en plaçant les deux quantités côte à côte (généralement avec le vecteur à droite).
La multiplication et la division scalaire-vecteur s’effectuent toutes deux avant toute addition et soustraction. Par exemple, équivaut à , et non à .
Un scalaire ne peut pas être divisé par un vecteur, et un vecteur ne peut pas être divisé par un autre vecteur.
L’opposé d’un vecteur peut être vu comme le cas particulier de la multiplication d’un vecteur par le scalaire .
2.6.2Interprétation géométrique
Géométriquement, multiplier un vecteur par un scalaire a pour effet de mettre à l’échelle la longueur d’un facteur . Par exemple, pour doubler la longueur d’un vecteur, nous multiplions le vecteur par 2. Si , la direction du vecteur est inversée. La Figure 2.9 illustre un vecteur multiplié par plusieurs scalaires différents.
2.7Addition et soustraction de vecteurs
Nous pouvons additionner et soustraire deux vecteurs, à condition qu’ils soient de même dimension. Le résultat est une quantité vectorielle de même dimension que les vecteurs opérandes. Nous utilisons la même notation pour l’addition et la soustraction vectorielles que pour l’addition et la soustraction de scalaires.
2.7.1Règles officielles d’algèbre linéaire
Les règles d’algèbre linéaire pour l’addition de vecteurs sont simples : pour additionner deux vecteurs, on additionne les composantes correspondantes :
Addition de deux vecteurs
La soustraction peut être interprétée comme l’addition de l’opposé, donc :
Soustraction de deux vecteurs
Par exemple, étant donnés
alors
Un vecteur ne peut pas être additionné ou soustrait avec un scalaire, ni avec un vecteur de dimension différente. De plus, tout comme l’addition et la soustraction de scalaires, l’addition vectorielle est commutative,
alors que la soustraction vectorielle est anticommutative,
2.7.2Interprétation géométrique
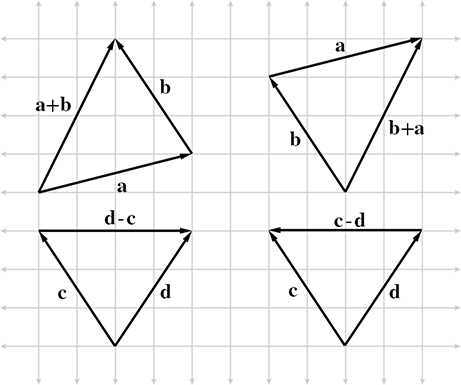
Figure 2.10Addition et soustraction de vecteurs 2D avec la règle du triangle.
Nous pouvons additionner les vecteurs et géométriquement en positionnant les vecteurs de sorte que la tête de touche la queue de , puis en traçant un vecteur depuis la queue de jusqu’à la tête de . Autrement dit, si nous partons d’un point et appliquons les déplacements spécifiés par puis , c’est équivalent à appliquer le déplacement unique . C’est ce qu’on appelle la règle du triangle pour l’addition vectorielle. Elle fonctionne aussi pour la soustraction vectorielle, comme illustré à la Figure 2.10.
La Figure 2.10 apporte une preuve géométrique que l’addition vectorielle est commutative mais pas la soustraction. Notez que le vecteur noté est identique au vecteur noté , mais les vecteurs et pointent dans des directions opposées car .
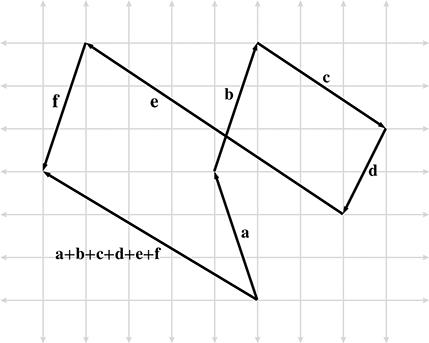
Figure 2.11Extension de la règle du triangle à plus de deux vecteurs
La règle du triangle peut être étendue à plus de deux vecteurs. La Figure 2.11 montre comment la règle du triangle vérifie ce que nous avons énoncé à la Section 2.3.1 : un vecteur peut être interprété comme une suite de déplacements alignés sur les axes.
La Figure 2.12 est une reproduction de la Figure 2.5, qui montre comment le vecteur peut être interprété comme un déplacement de 1 unité vers la droite, 3 unités vers le bas, puis 4 unités vers l’avant, et peut être vérifié mathématiquement par l’addition vectorielle :
Figure 2.12Interpréter un vecteur comme une suite de déplacements
Cela semble évident, mais c’est un concept très puissant. Nous utiliserons une technique similaire à la Section 4.2 pour transformer des vecteurs d’un espace de coordonnées à un autre.
2.7.3Vecteur déplacement d’un point à un autre
Il est très courant d’avoir besoin de calculer le déplacement d’un point à un autre. Dans ce cas, nous pouvons utiliser la règle du triangle et la soustraction vectorielle. La Figure 2.13 montre comment le vecteur déplacement de vers peut être calculé en soustrayant de .
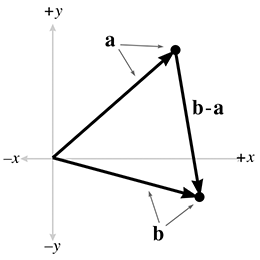
Figure 2.13 Utilisation de la soustraction vectorielle 2D pour calculer le vecteur du point au point
Comme le montre la Figure 2.13, pour calculer le vecteur de vers , nous interprétons les points et comme des vecteurs depuis l’origine, puis utilisons la règle du triangle. En fait, c’est ainsi que les vecteurs sont définis dans certains ouvrages : comme la soustraction de deux points.
Notez que la soustraction vectorielle donne un vecteur allant de vers . Il n’a pas de sens de simplement chercher le vecteur « entre deux points », car cette formulation ne précise pas de direction. Nous devons toujours former un vecteur qui va d’un point vers un autre point.
2.8Norme d’un vecteur (longueur)
Comme nous l’avons vu, les vecteurs ont une norme et une direction. Cependant, vous avez peut-être remarqué que ni la norme ni la direction ne sont exprimées explicitement dans le vecteur (du moins pas en coordonnées cartésiennes). Par exemple, la norme du vecteur 2D n’est ni 3 ni 4 ; elle vaut 5. Puisque la norme du vecteur n’est pas exprimée explicitement, nous devons la calculer. La norme d’un vecteur est également appelée sa longueur ou son module.
2.8.1Règles officielles d’algèbre linéaire
En algèbre linéaire, la norme d’un vecteur est notée avec des doubles barres verticales entourant le vecteur. C’est similaire à la notation avec une seule barre verticale utilisée pour la valeur absolue des scalaires. Cette notation et l’équation de calcul de la norme d’un vecteur de dimension arbitraire sont présentées dans l’Équation (2.2) :
Norme d’un vecteur de dimension arbitraire
Ainsi, la norme d’un vecteur est la racine carrée de la somme des carrés des composantes du vecteur. Cela peut sembler compliqué, mais les équations de norme pour les vecteurs 2D et 3D sont en réalité très simples :
Norme d’un vecteur pour les vecteurs 2D et 3D
La norme d’un vecteur est une quantité scalaire non négative. Un exemple de calcul de la norme d’un vecteur 3D :
Certains livres utilisent une notation à barre simple pour indiquer la norme d’un vecteur :
Une petite note pour satisfaire les puristes qui connaissent déjà les normes vectorielles et qui pointent en ce moment leur navigateur vers gamemath.com à la recherche de l’adresse de correction des erreurs. Le terme norme a en réalité une définition très générale, et pratiquement toute équation satisfaisant un certain ensemble de critères peut se qualifier de norme. Donc, décrire l’Équation (2.2) comme l’équation de la norme vectorielle est légèrement trompeur. Pour être plus précis, nous devrions dire que l’Équation (2.2) est l’équation de la norme 2, qui est une façon spécifique de calculer une norme. La norme 2 appartient à une classe de normes connues sous le nom de -normes, et la -norme n’est pas la seule façon de définir une norme. Néanmoins, omettre ce niveau de généralité n’est pas trop trompeur ; parce que la norme 2 mesure la distance euclidienne, c’est de loin la norme la plus utilisée dans les applications géométriques. Elle est également très utilisée dans des situations où une interprétation géométrique n’est pas directement applicable. Les lecteurs intéressés par ces exotica peuvent consulter l’Exercice 15.
2.8.2Interprétation géométrique
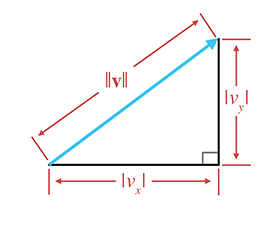
Figure 2.14Interprétation géométrique de l’équation de la norme
Essayons de mieux comprendre pourquoi l’Équation (2.3) fonctionne. Pour tout vecteur en 2D, nous pouvons former un triangle rectangle avec comme hypoténuse, comme illustré à la Figure 2.14.
Notez que pour être précis, nous avons dû mettre des signes de valeur absolue autour des composantes et . Les composantes du vecteur peuvent être négatives, puisqu’elles sont des déplacements signés, mais la longueur est toujours positive.
Le théorème de Pythagore stipule que pour tout triangle rectangle, le carré de la longueur de l’hypoténuse est égal à la somme des carrés des longueurs des deux autres côtés. En appliquant ce théorème à la Figure 2.14, nous avons
Puisque , nous pouvons omettre les signes de valeur absolue :
Puis, en prenant la racine carrée des deux membres et en simplifiant, nous obtenons
ce qui correspond à l’Équation (2.3). La preuve de l’équation de la norme en 3D n’est qu’un peu plus compliquée.
Pour toute norme positive , il existe une infinité de vecteurs de norme . Puisque ces vecteurs ont tous la même longueur mais des directions différentes, ils forment un cercle lorsque leurs queues sont placées à l’origine, comme illustré à la Figure 2.15.
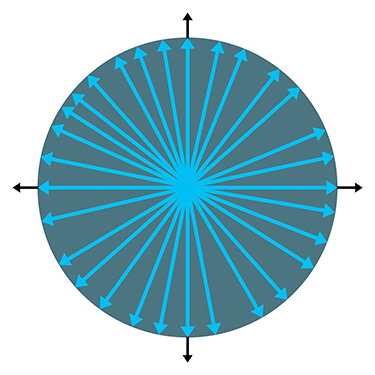
Figure 2.15 Pour toute norme positive, il existe une infinité de vecteurs ayant cette norme
2.9Vecteurs unitaires
Pour de nombreuses quantités vectorielles, nous ne nous intéressons qu’à la direction et non à la norme : « Dans quelle direction je regarde ? » « Dans quelle direction est orientée la surface ? » Dans ces cas, il est souvent commode d’utiliser des vecteurs unitaires. Un vecteur unitaire est un vecteur de norme égale à un. Les vecteurs unitaires sont également appelés vecteurs normalisés.
Les vecteurs unitaires sont aussi parfois simplement appelés normales ; cependant, une mise en garde s’impose concernant la terminologie. Le mot « normale » porte avec lui la connotation de « perpendiculaire ». Lorsque la plupart des gens parlent d’un vecteur « normal », ils font généralement référence à un vecteur perpendiculaire à quelque chose. Par exemple, une normale de surface en un point donné d’un objet est un vecteur perpendiculaire à la surface à cet endroit. Cependant, puisque le concept de perpendicularité ne dépend que de la direction d’un vecteur et non de sa norme, vous constaterez que dans la plupart des cas, des vecteurs unitaires sont utilisés pour les normales plutôt qu’un vecteur de longueur arbitraire. Lorsque ce livre désigne un vecteur comme une « normale », il entend « un vecteur unitaire perpendiculaire à quelque chose ». C’est un usage courant, mais sachez que le mot « normale » signifie principalement « perpendiculaire » et non « de longueur unitaire ». Étant donné qu’il est si courant que les normales soient des vecteurs unitaires, nous prendrons soin de signaler toute situation où un vecteur « normal » n’a pas une longueur unitaire.
En résumé, un vecteur « normalisé » a toujours une longueur unitaire, mais un vecteur « normal » est un vecteur perpendiculaire à quelque chose et, par convention, a généralement une longueur unitaire.
2.9.1Règles officielles d’algèbre linéaire
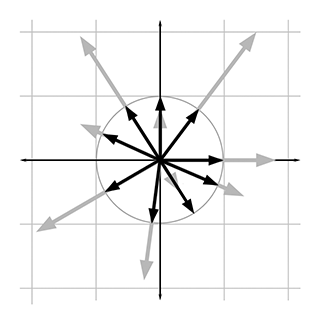
Figure 2.16Normalisation de vecteurs en 2D
Pour tout vecteur non nul , nous pouvons calculer un vecteur unitaire qui pointe dans la même direction que . Ce processus est appelé normalisation du vecteur. Dans ce livre, nous utilisons la notation courante qui consiste à mettre un chapeau sur les vecteurs unitaires ; par exemple, (prononcé « v chapeau »). Pour normaliser un vecteur, nous divisons le vecteur par sa norme :
Normalisation d’un vecteur
Par exemple, pour normaliser le vecteur 2D ,
Le vecteur nul ne peut pas être normalisé. Mathématiquement, cela n’est pas permis car cela entraînerait une division par zéro. Géométriquement, c’est logique car le vecteur nul ne définit pas de direction — si nous normalisions le vecteur nul, dans quelle direction le vecteur résultant devrait-il pointer ?
2.9.2Interprétation géométrique
En 2D, si nous traçons un vecteur unitaire avec la queue à l’origine, la tête du vecteur touchera un cercle unité centré à l’origine. (Un cercle unité a un rayon de 1.) En 3D, les vecteurs unitaires touchent la surface d’une sphère unité. La Figure 2.16 montre plusieurs vecteurs 2D de longueur arbitraire en gris, sous leurs homologues normalisés en noir.
Notez que normaliser un vecteur raccourcit certains vecteurs (si leur longueur était supérieure à 1) et en allonge d’autres (si leur longueur était inférieure à 1).
2.10La formule de distance
Nous sommes maintenant prêts à dériver l’une des formules les plus anciennes et les plus fondamentales de la géométrie algorithmique : la formule de distance. Cette formule est utilisée pour calculer la distance entre deux points.
Définissons d’abord la distance comme la longueur du segment de droite entre les deux points. Puisqu’un vecteur est un segment de droite orienté, géométriquement il est logique que la distance entre deux points soit égale à la longueur d’un vecteur allant d’un point à l’autre. Dérivons la formule de distance en 3D. Nous allons d’abord calculer le vecteur de vers . Nous avons appris à faire cela en 2D à la Section 2.7.3. En 3D, nous utilisons
La distance entre et est égale à la longueur du vecteur , que nous avons calculée à la Section 2.8 :
En substituant , nous obtenons
La formule de distance en 3D
Nous avons ainsi dérivé la formule de distance en 3D. L’équation 2D est encore plus simple :
La formule de distance en 2D
Voici un exemple en 2D :
Notez qu’il importe peu quel point nous appelons et lequel nous appelons . Si nous définissons comme le vecteur de vers plutôt que de vers , nous obtiendrons une équation légèrement différente mais mathématiquement équivalente.
2.11Produit scalaire de vecteurs
La Section 2.6 a montré comment multiplier un vecteur par un scalaire. Nous pouvons également multiplier deux vecteurs ensemble. Il existe deux types de produits vectoriels. Le premier est le produit scalaire (également connu sous le nom de produit intérieur), qui est le sujet de cette section. Nous parlons de l’autre produit vectoriel, le produit vectoriel (cross product), à la Section 2.12.
Le produit scalaire est omniprésent dans la programmation de jeux vidéo, utile dans tout, des graphismes à la simulation en passant par l’IA. En suivant la structure que nous avons adoptée pour les opérations, nous discutons d’abord des règles algébriques pour calculer les produits scalaires à la Section 2.11.1, suivies de quelques interprétations géométriques à la Section 2.11.2.
La formule du produit scalaire est l’une des rares formules de ce livre qui vaut la peine d’être mémorisée. Premièrement, elle est vraiment facile à mémoriser. De plus, si vous comprenez ce que fait le produit scalaire, la formule a du sens. Par ailleurs, le produit scalaire entretient des relations importantes avec de nombreuses autres opérations, telles que la multiplication matricielle, la convolution de signaux, les corrélations statistiques et les transformées de Fourier. Comprendre la formule rendra ces relations plus évidentes.
Encore plus important que de mémoriser une formule, c’est d’acquérir une compréhension intuitive de ce que fait le produit scalaire. S’il n’y a de la place dans votre cerveau que pour soit la formule soit la définition géométrique, nous recommandons d’intérioriser la géométrie et de vous faire tatouer la formule sur la main. Vous devez comprendre la définition géométrique pour utiliser le produit scalaire. Lorsque vous programmez dans des langages comme C++, HLSL, ou même Matlab et Maple, vous n’aurez de toute façon pas besoin de connaître la formule, puisque vous direz généralement à l’ordinateur d’effectuer un calcul de produit scalaire non pas en saisissant la formule, mais en invoquant une fonction de haut niveau ou un opérateur surchargé. De plus, la définition géométrique du produit scalaire ne suppose aucun référentiel particulier ni même l’utilisation de coordonnées cartésiennes.
2.11.1Règles officielles d’algèbre linéaire
Le nom « produit scalaire » vient du symbole point utilisé dans la notation : . Tout comme la multiplication scalaire-vecteur, le produit scalaire est effectué avant l’addition et la soustraction, à moins que des parenthèses ne soient utilisées pour modifier cet ordre des opérations. Notez que bien que nous omettions généralement le symbole de multiplication lorsque nous multiplions deux scalaires ou un scalaire et un vecteur, nous ne devons pas omettre le symbole point lors d’un produit scalaire. Si vous voyez jamais deux vecteurs placés côte à côte sans symbole entre eux, interprétez cela selon les règles de la multiplication matricielle, dont nous discutons au Chapitre 4.7
Le produit scalaire de deux vecteurs est la somme des produits des composantes correspondantes, donnant un scalaire :
Produit scalaire de vecteurs
Cela peut s’exprimer de façon concise avec la notation de sommation
Produit scalaire avec notation de sommation
En appliquant ces règles aux cas 2D et 3D, on obtient
Produits scalaires 2D et 3D
Des exemples de produit scalaire en 2D et 3D :
Il est évident à l’examen des équations que le produit scalaire est commutatif : . D’autres lois d’algèbre vectorielle concernant le produit scalaire sont données à la Section 2.13.
2.11.2Interprétation géométrique
Discutons maintenant de l’aspect le plus important du produit scalaire : sa signification géométrique. Il serait difficile de trop insister sur l’importance du produit scalaire, car il est fondamental pour presque tous les aspects des mathématiques 3D. En raison de son importance capitale, nous allons nous y attarder un peu. Nous allons aborder deux façons légèrement différentes d’appréhender géométriquement cette opération ; puisqu’elles sont vraiment équivalentes, vous pouvez penser que l’une ou l’autre est « plus fondamentale », ou peut-être que vous pensez que nous sommes redondants et que nous vous faisons perdre votre temps. Vous pourriez surtout le penser si vous connaissez déjà un peu le produit scalaire, mais indulgez-nous.
La première définition géométrique à présenter est peut-être la moins courante des deux, mais conformément aux conseils de Dray et Manogue [1], nous pensons qu’elle est en réalité la plus utile. L’interprétation que nous considérons en premier est celle du produit scalaire effectuant une projection.
Supposons pour l’instant que est un vecteur unitaire et que est un vecteur de longueur quelconque. Projetons maintenant sur une droite parallèle à , comme dans la Figure 2.17.
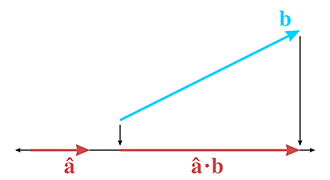
Figure 2.17Le produit scalaire comme projection
(Rappelons que les vecteurs sont des déplacements et n’ont pas de position fixe, donc nous sommes libres de les déplacer n’importe où sur un diagramme.) Nous pouvons définir le produit scalaire comme la longueur signée de la projection de sur cette droite. Le terme « projection » a quelques significations techniques différentes (voir la Section 5.3) et nous ne tenterons pas une définition formelle ici.8 Vous pouvez penser à la projection de sur comme à l’« ombre » que projette sur quand les rayons de lumière sont perpendiculaires à .
Nous avons représenté les projections comme des flèches, mais rappelons que le résultat d’un produit scalaire est un scalaire, et non un vecteur. Cependant, lorsque vous avez appris les nombres négatifs pour la première fois, votre professeur les représentait probablement comme des flèches sur une droite numérique pour souligner leur signe, tout comme nous le faisons ici. Après tout, un scalaire est un vecteur unidimensionnel parfaitement valide.
Que signifie le fait que le produit scalaire mesure une longueur signée ? Cela signifie que la valeur sera négative lorsque la projection de pointe dans la direction opposée à , et que la projection a une longueur nulle (c’est un point unique) lorsque et sont perpendiculaires. Ces cas sont illustrés à la Figure 2.18.
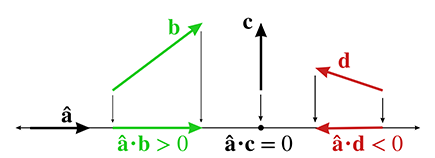
Figure 2.18Signe du produit scalaire
En d’autres termes, le signe du produit scalaire peut nous donner une classification approximative des directions relatives des deux vecteurs. Imaginez une droite (en 2D) ou un plan (en 3D) perpendiculaire au vecteur . Le signe du produit scalaire nous indique dans quel demi-espace se trouve . C’est illustré à la Figure 2.19.
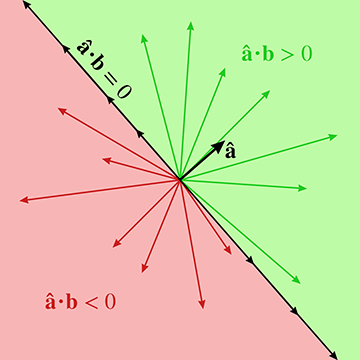
Figure 2.19 Le signe du produit scalaire donne une classification approximative de l’orientation relative de deux vecteurs.
Considérons maintenant ce qui se passe quand nous mettons à l’échelle par un facteur . Comme illustré à la Figure 2.20, la longueur de la projection (et donc la valeur du produit scalaire) augmente du même facteur. Les deux triangles ont des angles intérieurs égaux et sont donc semblables. Puisque l’hypoténuse de droite est plus longue que l’hypoténuse de gauche d’un facteur , par les propriétés des triangles semblables, la base de droite est aussi plus longue d’un facteur .
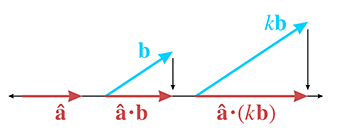
Figure 2.20Mise à l’échelle d’un opérande du produit scalaire
Énonçons ce fait algébriquement et prouvons-le avec la formule :
Le produit scalaire est associatif avec la multiplication par un scalaire
Le calcul scalaire développé au milieu utilise trois dimensions comme exemple, mais la notation vectorielle aux extrémités de l’équation s’applique pour des vecteurs de n’importe quelle dimension.
Nous avons vu ce qui se passe quand nous mettons à l’échelle : la longueur de sa projection sur augmente avec la valeur du produit scalaire. Et si nous mettons à l’échelle ? L’argument algébrique que nous venons de faire peut être utilisé pour montrer que la valeur du produit scalaire est proportionnelle à la longueur de , tout comme lorsque nous mettons à l’échelle. En d’autres termes,
Le produit scalaire est associatif avec la multiplication par un scalaire pour l’un ou l’autre vecteur
Ainsi, mettre à l’échelle change la valeur numérique du produit scalaire. Cependant, ce changement d’échelle n’a aucun effet géométrique sur la longueur de la projection de sur . Maintenant que nous savons ce qui se passe si nous mettons à l’échelle ou , nous pouvons écrire notre définition géométrique sans aucune hypothèse sur la longueur des vecteurs.
Produit scalaire comme projection
Le produit scalaire est égal à la longueur signée de la projection de sur toute droite parallèle à , multipliée par la longueur de .
En continuant à examiner les propriétés du produit scalaire, certaines seront plus faciles à illustrer géométriquement lorsque , ou les deux et , sont des vecteurs unitaires. Puisque nous avons montré que mettre à l’échelle ou met directement à l’échelle la valeur du produit scalaire, il sera facile de généraliser nos résultats après les avoir obtenus. De plus, dans les arguments algébriques accompagnant chaque argument géométrique, les hypothèses de vecteur unitaire ne seront pas nécessaires. Rappelons que nous mettons des chapeaux sur les vecteurs supposés de longueur unitaire.
Vous vous demandez peut-être pourquoi le produit scalaire mesure la projection du second opérande sur le premier, et non l’inverse. Lorsque les deux vecteurs et sont des vecteurs unitaires, nous pouvons facilement faire valoir géométriquement que la projection de sur a la même longueur que la projection de sur . Considérons la Figure 2.21. Les deux triangles ont des angles intérieurs égaux et sont donc semblables. Puisque et sont des côtés correspondants de même longueur, les deux triangles sont des réflexions l’un de l’autre.
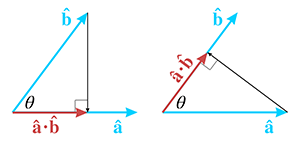
Figure 2.21Le produit scalaire est commutatif
Nous avons déjà montré comment la mise à l’échelle de l’un ou l’autre vecteur met à l’échelle le produit scalaire proportionnellement, donc ce résultat s’applique pour et de longueur arbitraire. De plus, ce fait géométrique est aussi trivialement vérifié par la formule, qui ne dépend pas de l’hypothèse que les vecteurs ont la même longueur. En utilisant deux dimensions comme exemple cette fois,
Le produit scalaire est commutatif
La propriété importante suivante du produit scalaire est qu’il est distributif sur l’addition et la soustraction, tout comme la multiplication scalaire. Cette fois, faisons l’algèbre avant la géométrie. Quand on dit que le produit scalaire « se distribue », cela signifie que si l’un des opérandes du produit scalaire est une somme, nous pouvons prendre le produit scalaire des parties individuellement, puis prendre leur somme. En revenant à trois dimensions pour notre exemple,
Le produit scalaire se distribue sur l’addition et la soustraction
En remplaçant par , il est clair que le produit scalaire se distribue sur la soustraction vectorielle comme il le fait pour l’addition vectorielle. La Figure 2.22 montre comment le produit scalaire se distribue sur l’addition.
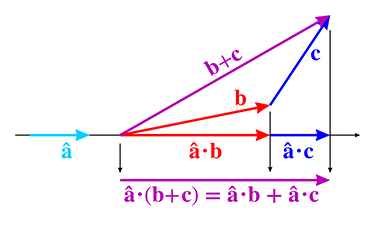
Figure 2.22Le produit scalaire se distribue sur l’addition.
Considérons maintenant une situation particulière où l’un des vecteurs est le vecteur unitaire pointant dans la direction , que nous noterons . Comme illustré à la Figure 2.23, la longueur signée de la projection est simplement la coordonnée du vecteur original. En d’autres termes, prendre le produit scalaire d’un vecteur avec un axe cardinal « filtre » la coordonnée correspondant à cet axe.
Si nous combinons cette propriété de « filtrage » du produit scalaire avec le fait qu’il se distribue sur l’addition, que nous avons pu montrer en termes purement géométriques, nous pouvons voir pourquoi la formule doit être ce qu’elle est.
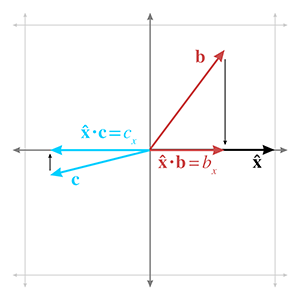
Figure 2.23 Prendre le produit scalaire avec un axe cardinal filtre la coordonnée correspondante.
Parce que le produit scalaire mesure la longueur d’une projection, il a une relation intéressante avec le calcul de la norme vectorielle. Rappelons que la norme vectorielle est un scalaire mesurant la quantité de déplacement (la longueur) du vecteur. Le produit scalaire mesure aussi la quantité de déplacement, mais seul le déplacement dans une direction particulière est comptabilisé ; le déplacement perpendiculaire est éliminé par la projection. Mais que se passe-t-il si nous mesurons le déplacement dans la même direction que celle vers laquelle pointe le vecteur ? Dans ce cas, tout le déplacement du vecteur est dans la direction mesurée, donc si nous projetons un vecteur sur lui-même, la longueur de cette projection est simplement la norme du vecteur. Mais rappelons que est égal à la longueur de la projection de sur , multipliée par . Si nous faisons le produit scalaire d’un vecteur avec lui-même, comme , nous obtenons la longueur de la projection, qui est , fois la longueur du vecteur sur lequel nous projetons, qui est aussi . En d’autres termes,
Relation entre la norme vectorielle et le produit scalaire
Avant de passer à la deuxième interprétation du produit scalaire, examinons une autre utilisation très courante comme projection. Supposons à nouveau que est un vecteur unitaire et que a une longueur arbitraire. En utilisant le produit scalaire, il est possible de séparer en deux valeurs, et (lire « parallèle » et « perp »), qui sont respectivement parallèles et perpendiculaires à , tels que . La Figure 2.24 illustre la géométrie impliquée.
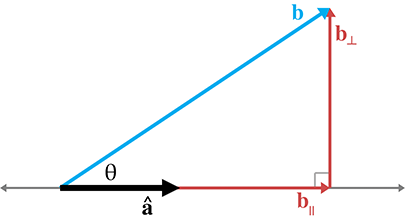
Figure 2.24Projection d’un vecteur sur un autre
Nous avons déjà établi que la longueur de sera égale à . Mais le produit scalaire donne un scalaire, et est un vecteur, donc nous allons prendre la direction spécifiée par le vecteur unitaire et la mettre à l’échelle :
Une fois que nous connaissons , nous pouvons facilement résoudre pour :
Il n’est pas trop difficile de généraliser ces résultats au cas où n’est pas un vecteur unitaire.
Dans le reste de ce livre, nous utilisons ces équations à plusieurs reprises pour séparer un vecteur en composantes parallèles et perpendiculaires à un autre vecteur.
Examinons maintenant le produit scalaire sous l’angle de la trigonométrie. C’est l’interprétation géométrique la plus courante du produit scalaire, qui met davantage l’accent sur l’angle entre les vecteurs. Nous avons raisonné en termes de projections, donc nous n’avons pas eu grand besoin de cet angle. Des auteurs moins expérimentés et consciencieux [2] pourraient ne vous donner qu’un seul des deux points de vue importants, ce qui est probablement suffisant pour interpréter une équation contenant le produit scalaire. Cependant, une compétence plus précieuse est de reconnaître les situations pour lesquelles le produit scalaire est le bon outil ; il est parfois utile d’avoir d’autres interprétations signalées, même si elles sont « évidemment » équivalentes entre elles.
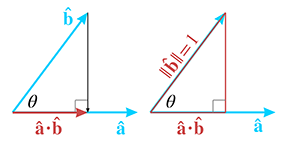
Figure 2.25 Interprétation du produit scalaire par la trigonométrie du triangle rectangle
Considérons le triangle rectangle du côté droit de la Figure 2.25. Comme le montre la figure, la longueur de l’hypoténuse est 1 (puisque est un vecteur unitaire) et la longueur de la base est égale au produit scalaire . D’après la trigonométrie élémentaire (qui a été revue à la Section 1.4.4), rappelons que le cosinus d’un angle est le rapport de la longueur du côté adjacent divisé par la longueur de l’hypoténuse. En substituant les valeurs de la Figure 2.25, nous avons
En d’autres termes, le produit scalaire de deux vecteurs unitaires est égal au cosinus de l’angle entre eux. Cette affirmation est vraie même si le triangle rectangle de la Figure 2.25 ne peut pas être formé, lorsque et . Rappelons que le produit scalaire de n’importe quel vecteur avec le vecteur extraira simplement la coordonnée du vecteur. En fait, la coordonnée d’un vecteur unitaire qui a été tourné d’un angle depuis la position standard est une façon de définir la valeur de . Consultez la Section 1.4.4 si cela n’est plus frais dans votre mémoire.
En combinant ces idées avec l’observation précédente que la mise à l’échelle d’un vecteur met à l’échelle le produit scalaire du même facteur, nous arrivons à la relation générale entre le produit scalaire et le cosinus.
Relation du produit scalaire avec l’angle intercepté
Le produit scalaire de deux vecteurs et est égal au cosinus de l’angle entre les vecteurs, multiplié par les longueurs des vecteurs (voir la Figure 2.26). Formellement,
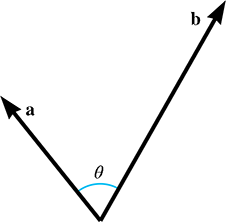
Figure 2.26Le produit scalaire est lié à l’angle entre deux vecteurs.
Que signifie mesurer l’angle entre deux vecteurs en 3D ? Deux vecteurs quelconques se trouvent toujours dans un plan commun (placez-les queue contre queue pour le constater), et nous mesurons donc l’angle dans le plan contenant les deux vecteurs. Si les vecteurs sont parallèles, le plan n’est pas unique, mais l’angle est soit soit , et le choix du plan n’a pas d’importance.
Le produit scalaire nous fournit un moyen de calculer l’angle entre deux vecteurs. En résolvant l’Équation (2.4) pour ,
Utilisation du produit scalaire pour calculer l’angle entre deux vecteurs
Nous pouvons éviter la division dans l’Équation (2.5) si nous savons que et sont des vecteurs unitaires. Dans ce cas très courant, le dénominateur de l’Équation (2.5) vaut trivialement 1, et il reste
Calcul de l’angle entre deux vecteurs unitaires
Si nous n’avons pas besoin de la valeur exacte de et n’avons besoin que d’une classification de l’orientation relative de et , nous n’avons besoin que du signe du produit scalaire. C’est la même idée illustrée à la Figure 2.18, sauf que maintenant nous pouvons la relier à l’angle , comme indiqué dans le Tableau 2.1.
| L’angle est | et sont | ||
| aigu | pointant globalement dans la même direction | ||
| droit | perpendiculaires | ||
| obtus | pointant globalement dans la direction opposée |
Tableau 2.1 Le signe du produit scalaire peut être utilisé comme classification approximative de l’angle entre deux vecteurs.
Puisque la norme des vecteurs n’affecte pas le signe du produit scalaire, le Tableau 2.1 s’applique quelle que soit la longueur de et . Cependant, notez que si ou est le vecteur nul, alors . Ainsi, lorsque nous utilisons le produit scalaire pour classer la relation entre deux vecteurs, le produit scalaire agit comme si le vecteur nul était perpendiculaire à tout autre vecteur. Il s’avère que le produit vectoriel se comporte différemment.
Résumons les propriétés géométriques du produit scalaire.
Le produit scalaire mesure la longueur de la projection de sur , multipliée par la longueur de .
Le produit scalaire peut être utilisé pour mesurer un déplacement dans une direction particulière.
L’opération de projection est étroitement liée à la fonction cosinus. Le produit scalaire est aussi égal à , où est l’angle entre les vecteurs.
Nous passerons en revue les propriétés commutatives et distributives du produit scalaire à la fin de ce chapitre avec d’autres propriétés algébriques des opérations vectorielles.
2.12Produit vectoriel de vecteurs
L’autre produit de vecteurs, connu sous le nom de produit vectoriel, ne peut être appliqué qu’en 3D. Contrairement au produit scalaire, qui donne un scalaire et est commutatif, le produit vectoriel donne un vecteur 3D et n’est pas commutatif.
2.12.1Règles officielles d’algèbre linéaire
Comme pour le produit scalaire, le terme produit « vectoriel » (cross product) vient du symbole utilisé dans la notation . Nous écrivons toujours le symbole ×, sans l’omettre comme nous le faisons avec la multiplication scalaire. L’équation du produit vectoriel est
Produit vectoriel
Par exemple,
Le produit vectoriel bénéficie du même niveau de priorité des opérateurs que le produit scalaire : la multiplication est effectuée avant l’addition et la soustraction. Lorsque produit scalaire et produit vectoriel sont utilisés ensemble, le produit vectoriel a la priorité : . Heureusement, il y a un moyen facile de s’en souvenir : c’est la seule façon dont cela peut fonctionner. Le produit scalaire retourne un scalaire, et donc est indéfini, car on ne peut pas prendre le produit vectoriel d’un scalaire et d’un vecteur. L’opération est connue sous le nom de produit mixte. Nous présentons certaines propriétés spéciales de ce calcul à la Section 6.1.
Comme mentionné précédemment, le produit vectoriel n’est pas commutatif. En fait, il est anticommutatif : . Le produit vectoriel n’est pas non plus associatif. En général, . D’autres lois d’algèbre vectorielle concernant le produit vectoriel sont données à la Section 2.13.
2.12.2Interprétation géométrique
Le produit vectoriel donne un vecteur perpendiculaire aux deux vecteurs originaux, comme illustré à la Figure 2.27.
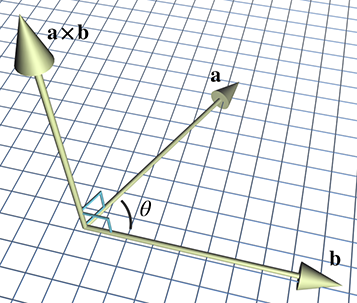
Figure 2.27Produit vectoriel
La longueur de est égale au produit des normes de et et du sinus de l’angle entre et :
La norme du produit vectoriel est liée au sinus de l’angle entre les vecteurs
Il s’avère que c’est aussi égal à l’aire du parallélogramme formé avec deux côtés et . Voyons si nous pouvons vérifier pourquoi c’est vrai à l’aide de la Figure 2.28.
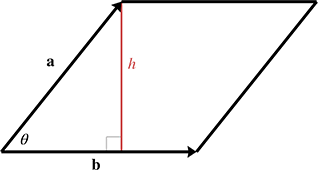
Figure 2.28Un parallélogramme de côtés et
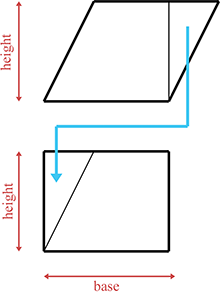
Figure 2.29Aire d’un parallélogramme Figure 2.29Aire d’un parallélogramme
Tout d’abord, à partir de la géométrie plane, nous savons que l’aire du parallélogramme est , le produit de la base et de la hauteur. (Dans Figure 2.28, la base est .) Nous pouvons vérifier cette règle en « découpant » un triangle d’une extrémité et en le déplaçant à l’autre extrémité, formant ainsi un rectangle, comme le montre la Figure 2.29.
L’aire d’un rectangle est donnée par sa longueur et sa largeur. Dans ce cas, cette aire est le produit . Puisque l’aire du rectangle est égale à l’aire du parallélogramme, l’aire du parallélogramme doit aussi être .
En revenant à Figure 2.28, soit et les longueurs de et , respectivement, et notons que . Alors
Si et sont parallèles, ou si ou est le vecteur nul, alors . Le produit vectoriel interprète donc le vecteur nul comme étant parallèle à tout autre vecteur. Remarquons que ceci est différent du produit scalaire, qui interprète le vecteur nul comme étant perpendiculaire à tout autre vecteur. (Bien sûr, il est mal défini de décrire le vecteur nul comme étant perpendiculaire ou parallèle à un vecteur quelconque, puisque le vecteur nul n’a pas de direction.)
Nous avons affirmé que est perpendiculaire à et . Mais il existe deux directions qui sont perpendiculaires à et — laquelle de ces deux directions désigne ? Nous pouvons déterminer la direction de en plaçant la tête de à la queue de , et en examinant si nous effectuons une rotation horaire ou antihoraire de vers . Dans un système de coordonnées main gauche, pointe vers vous si les vecteurs et effectuent une rotation horaire depuis votre point de vue, et s’éloigne de vous si et effectuent une rotation antihoraire. Dans un système de coordonnées main droite, l’exact opposé se produit : si et effectuent une rotation antihoraire, pointe vers vous, et si et effectuent une rotation horaire, s’éloigne de vous.
| Rotation horaire | Rotation antihoraire |
 |
 |
| Dans un système de coordonnées main gauche, (non représenté) pointe vers vous. Dans un système de coordonnées main droite, s’éloigne de vous. | Dans un système de coordonnées main gauche, (non représenté) s’éloigne de vous. Dans un système de coordonnées main droite, pointe vers vous. |
Figure 2.30Déterminer les rotations horaires et antihoraires
Figure 2.30 montre les rotations horaires et antihoraires. Remarquons que pour effectuer la détermination horaire ou antihoraire, nous devons aligner la
tête de avec la queue de . Comparons cela à Figure 2.26, où les queues se touchent. L’alignement queue-à-queue montré dans Figure 2.26 est la manière correcte de positionner les vecteurs pour mesurer l’angle entre eux, mais pour juger si la rotation est horaire ou antihoraire, les vecteurs doivent être alignés tête-à-queue, comme le montre la Figure 2.30.
Appliquons cette règle générale au cas particulier des axes cardinaux. Soit , et des vecteurs unitaires pointant dans les directions , et , respectivement. Les résultats du produit vectoriel de chaque paire d’axes sont
Produit vectoriel des axes cardinaux
On peut aussi se souvenir du sens du produit vectoriel en utilisant sa main, de manière similaire à la façon dont nous avons distingué les espaces de coordonnées main gauche et main droite dans Section 1.3.3. Puisque nous utilisons un espace de coordonnées main gauche dans ce livre, nous allons montrer comment procéder avec la main gauche. Supposons que vous ayez deux vecteurs, et , et que vous vouliez déterminer la direction vers laquelle pointe. Pointez votre pouce dans la direction de , et votre index (approximativement) dans la direction de . Si et pointent dans des directions presque opposées, cela peut être difficile. Assurez-vous simplement que si votre pouce pointe exactement dans la direction de , votre index se trouve du même côté de que le vecteur . Avec les doigts dans cette position, étendez votre majeur perpendiculairement à votre pouce et votre index, comme nous l’avons fait dans Section 1.3.3. Votre majeur pointe maintenant dans la direction de .
Bien sûr, un truc similaire fonctionne avec la main droite pour les espaces de coordonnées main droite.
L’une des utilisations les plus importantes du produit vectoriel est de créer un vecteur perpendiculaire à un plan (voir Section 9.5), à un triangle (Section 9.6), ou à un polygone (Section 9.7).
2.13Identités d’algèbre linéaire
Le philosophe grec Arcésilas aurait dit : « Là où vous trouverez les lois les plus nombreuses, là vous trouverez aussi la plus grande injustice. » Eh bien, personne n’a dit que l’algèbre vectorielle était juste. Tableau 2.2 liste quelques lois d’algèbre vectorielle qui sont parfois utiles mais ne devraient pas être mémorisées. Plusieurs identités sont évidentes et sont listées par souci d’exhaustivité ; toutes peuvent être déduites des définitions données dans les sections précédentes.
| Identité | Commentaires |
| Propriété commutative de l’addition vectorielle | |
| Définition de la soustraction vectorielle | |
| Propriété associative de l’addition vectorielle | |
| Propriété associative de la multiplication scalaire | |
| La multiplication scalaire est distributive sur l’addition vectorielle | |
| Multiplier un vecteur par un scalaire met la norme à l’échelle par un facteur égal à la valeur absolue du scalaire | |
| La norme d’un vecteur est non négative | |
| Le théorème de Pythagore appliqué à l’addition vectorielle. | |
| Règle du triangle pour l’addition vectorielle. (Aucun côté ne peut être plus long que la somme des deux autres côtés.) | |
| Propriété commutative du produit scalaire | |
| Norme d’un vecteur définie par le produit scalaire | |
| Propriété associative de la multiplication scalaire avec le produit scalaire | |
| Le produit scalaire est distributif sur l’addition et la soustraction vectorielles | |
| Le produit vectoriel de tout vecteur avec lui-même est le vecteur nul. (Car tout vecteur est parallèle à lui-même.) | |
| Le produit vectoriel est anticommutatif. | |
| Inverser les deux opérandes du produit vectoriel donne le même vecteur. | |
| Propriété associative de la multiplication scalaire avec le produit vectoriel. | |
| Le produit vectoriel est distributif sur l’addition et la soustraction vectorielles. |
Tableau 2.2Table des identités d’algèbre vectorielle
Exercices
Soit
Identifiez , et comme vecteurs ligne ou colonne, et donnez la dimension de chaque vecteur.
Calculez .
Identifiez les grandeurs dans chacune des phrases suivantes comme scalaires ou vectorielles. Pour les grandeurs vectorielles, donnez la norme et la direction. (Remarque : certaines directions peuvent être implicites.)
Combien pesez-vous ?
Avez-vous une idée de la vitesse à laquelle vous alliez ?
C’est à deux rues au nord d’ici.
Nous croisisons de Los Angeles à New York à 600 mph, à une altitude de 33 000 ft.
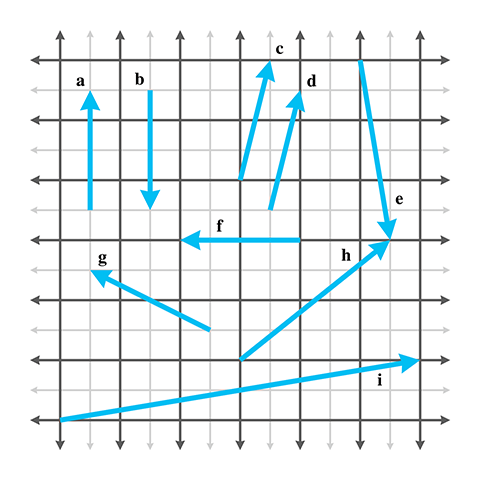
Donnez les valeurs des vecteurs suivants. Les lignes de grille plus sombres représentent une unité.
Identifiez les affirmations suivantes comme vraies ou fausses. Si l’affirmation est fausse, expliquez pourquoi.
La taille d’un vecteur dans un diagramme n’a pas d’importance ; il suffit de le dessiner au bon endroit.
Le déplacement exprimé par un vecteur peut être visualisé comme une séquence de déplacements alignés sur les axes.
Ces déplacements alignés sur les axes de la question précédente doivent se produire dans l’ordre.
Le vecteur donne le déplacement du point vers l’origine.
Évaluez les expressions vectorielles suivantes :
Normalisez les vecteurs suivants :
Évaluez les expressions vectorielles suivantes :
Calculez la distance entre les paires de points suivantes :
Évaluez les expressions vectorielles suivantes :
Étant donné les deux vecteurs
décomposez en composantes perpendiculaires et parallèles à . (Comme la notation l’indique, est un vecteur unitaire.)
Utilisez la définition géométrique du produit scalaire
pour prouver la loi des cosinus.
Utilisez les identités trigonométriques et la définition algébrique du produit scalaire en 2D
pour prouver l’interprétation géométrique du produit scalaire en 2D. (Indice : dessinez un diagramme des vecteurs et de tous les angles impliqués.)
Calculez et pour les vecteurs suivants :
Prouvez la formule de la norme du produit vectoriel
(Indice : utilisez l’interprétation géométrique du produit scalaire et essayez de montrer que les membres gauche et droit de l’équation sont équivalents, plutôt que d’essayer de déduire l’un de l’autre.)
Section 2.8 a introduit la norme d’un vecteur, c’est-à-dire une valeur scalaire associée à un vecteur donné. Cependant, la définition de la norme donnée dans cette section n’est pas la seule définition d’une norme pour un vecteur. En général, la -norme d’un vecteur de dimension est définie comme
Parmi les -normes les plus courantes, on trouve :
La norme , aussi appelée norme du taxi (taxicab norm) ( ) :
La norme , aussi appelée norme euclidienne ( ). C’est la norme la plus courante et la plus familière, car elle mesure la longueur géométrique :
La norme infinie, aussi appelée norme de Chebyshev ( ) :
Chacune de ces normes peut être considérée comme une façon d’attribuer une longueur ou une taille à un vecteur. La norme euclidienne a été présentée dans Section 2.8. La norme du taxi tire son nom de la façon dont un taxi mesure la distance en circulant dans les rues d’une ville organisée en grille (par exemple, Cartesia de Section 1.2.1). Par exemple, un taxi qui parcourt 1 pâté de maisons vers l’est et 1 pâté de maisons vers le nord parcourt une distance totale de 2 pâtés de maisons, tandis qu’un oiseau volant « à vol d’oiseau » peut aller en ligne droite du début à la fin et ne parcourir que pâtés de maisons (norme euclidienne). La norme de Chebyshev est simplement la valeur absolue de la composante du vecteur ayant la plus grande valeur absolue. Un exemple d’utilisation de cette norme est de considérer le nombre de coups nécessaires pour déplacer un roi aux échecs d’une case à une autre. Les cases immédiatement adjacentes nécessitent 1 coup, les cases entourant celles-là nécessitent 2 coups, et ainsi de suite.
(a) Pour chacun des vecteurs suivants, trouvez , , et :
(1)
(2)
(3)
(4)
(5)
*(b) Dessinez le cercle unité (c’est-à-dire l’ensemble de tous les vecteurs tels que ) centré à l’origine pour la norme , la norme et la norme infinie.
Un homme est en train d’embarquer dans un avion. La compagnie aérienne a une règle selon laquelle aucun bagage à main ne peut dépasser deux pieds de long, deux pieds de large ou deux pieds de hauteur. Il possède une épée très précieuse qui mesure trois pieds de long, pourtant il est capable de l’emporter à bord avec lui.9 Comment peut-il faire cela ? Quel est l’objet le plus long possible qu’il pourrait embarquer ?
Vérifiez Figure 2.11 numériquement.
Le système de coordonnées utilisé dans Figure 2.27 est-il un système de coordonnées main gauche ou main droite ?
Une façon courante de définir une boîte englobante pour un objet 2D consiste à spécifier un point central et un vecteur rayon , où chaque composante de représente la moitié de la longueur du côté de la boîte englobante le long de l’axe correspondant.
Décrivez les quatre coins , , et .
Décrivez les huit coins d’un cube englobant, en étendant cette idée à la 3D.
Un personnage non-joueur (PNJ) se trouve à la position avec une direction avant de .
Comment peut-on utiliser le produit scalaire pour déterminer si le point se trouve devant ou derrière le PNJ ?
Soit et . Pour chacun des points suivants, déterminez si se trouve devant ou derrière le PNJ :
(1)
(2)
(3)
(4)
(5)
(6)
(7)
En étendant le concept de Exercice 20, considérons le cas où le PNJ a un champ de vision (CdV) limité. Si l’angle total du CdV est , alors le PNJ peut voir à gauche ou à droite de sa direction avant jusqu’à un angle maximal de .
Comment peut-on utiliser le produit scalaire pour déterminer si le point est visible par le PNJ ?
Pour chacun des points de Exercice 20, déterminez si est visible par le PNJ si son CdV est .
Supposons que la distance de vision du PNJ soit également limitée à une distance maximale de 7 unités. Quels points lui sont alors visibles ?
Considérons trois points notés , et dans le plan de notre système de coordonnées main gauche, représentant des points de passage sur le chemin d’un PNJ.
Comment peut-on utiliser le produit vectoriel pour déterminer si, en se déplaçant de vers puis vers , le PNJ effectue une rotation horaire ou antihoraire en , en observant le chemin depuis le dessus ?
Pour chacun des ensembles de trois points suivants, déterminez si le PNJ tourne de manière horaire ou antihoraire en se déplaçant de vers puis vers :
(1) , ,
(2) , ,
(3) , ,
(4) , ,
Dans la dérivation d’une matrice pour mettre à l’échelle le long d’un axe arbitraire, nous arrivons à une étape où nous avons l’expression vectorielle
où est un vecteur arbitraire et est un scalaire arbitraire, mais est l’un des axes cardinaux. Substituez la valeur et simplifiez l’expression résultante pour . La réponse n’est pas une expression vectorielle, mais un vecteur unique, où les expressions scalaires pour chaque coordonnée ont été simplifiées.
Un problème similaire se pose lors de la dérivation d’une matrice de rotation autour d’un axe arbitraire. Étant donné un scalaire arbitraire et un vecteur , substituez et simplifiez la valeur de dans l’expression
Quel est notre vecteur, Victor ?
— Capitaine Oveur dans Y a-t-il un pilote dans l’avion ? (1980)
Références
[1] Tevian Dray et Corinne A. Manogue. « The Geometry of the Dot and Cross Products. » Journal of Online Mathematics and Its Applications 6. http://mathdl.maa.org/images/upload_library/4/vol6/Dray2/Dray.pdf.
[2] Fletcher Dunn et Ian Parberry. 3D Math Primer for Graphics and Game Development, première édition. Plano, TX: Wordware Publishing, 2002.
Mais le point de vue adopté par les manuels de physique est probablement le plus approprié pour la programmation de jeux vidéo, du moins au début.
La police de caractères utilisée ici n’est pas destinée à limiter la discussion à l’ensemble des scalaires. Nous parlons d’éléments dans n’importe quel ensemble. Nous demandons également l’indulgence des puristes d’algèbre abstraite pour notre utilisation du mot « ensemble », alors que nous devrions utiliser « groupe ». Mais ce dernier terme n’est pas aussi largement compris, et nous ne pouvions nous permettre que cette note de bas de page pour traiter de la distinction.
Mais nous connaissons notre position relative par rapport au Taco Bell le plus proche.
Si vous êtes l’une de ces personnes, alors ceci est un avertissement d’un genre légèrement différent !
En réalité, parfois plus lent, selon votre compilateur.
Environ 20 micropascals. Cependant, ce nombre varie selon la fréquence. Il augmente également avec l’âge. Un auteur se souvient que lorsqu’il était jeune, son père n’éteignait jamais complètement la radio dans la voiture, mais baissait plutôt le volume en dessous du seuil d’audition (du père). Le seuil d’audition du fils était juste assez bas pour que cela soit irritant. Aujourd’hui le fils possède sa propre voiture et sa propre autoradio, et a réalisé, avec un certain embarras, qu’il baisse aussi souvent le volume de la radio sans l’éteindre. Cependant, il avance pour sa défense qu’il le baisse complètement, en dessous du seuil d’audition de tout le monde. (L’autre auteur souhaite suggérer qu’il est clair que même le terme « être humain normal » est relatif.)
Une notation que vous rencontrerez probablement consiste à traiter le produit scalaire comme une multiplication matricielle ordinaire, notée si et sont interprétés comme des vecteurs colonnes, ou pour les vecteurs lignes. Si cela n’a aucun sens, ne vous inquiétez pas, nous y reviendrons après avoir appris la multiplication matricielle et les vecteurs lignes et colonnes dans le Chapitre 4.
Nous manquons ainsi à notre devoir traditionnel en tant qu’auteurs de mathématiques de rendre les concepts intuitifs bien plus compliqués qu’ils ne le sont.
Veuillez ignorer le fait que cela ne pourrait jamais se produire aujourd’hui pour des raisons de sécurité. Vous pouvez considérer cet exercice comme se déroulant dans un film de Quentin Tarantino.
<< Systèmes de coordonnées cartésiennes
Retour en haut
Espaces de coordonnées multiples >>