<< Sujets Mathématiques\ de la 3D graphique
Mécanique 2 : Dynamique Linéaire et Rotationnelle >>
Chapitre 11
Mécanique 1 : Cinématique Linéaire et Calcul
Ne confondez jamais le mouvement avec l’action.
— Ernest Hemingway (1899–1961)
« Mesdames et messieurs, puis-je attirer votre attention sur la piste centrale. Contemplez devant vous deux manuels ordinaires, l’un intitulé Physique Générale et l’autre Calcul Intégral. Leurs 2 500 pages combinées pèsent plus de 10 kg. Pourtant, dans ce chapitre et le suivant, vos courageux auteurs-cascadeurs vont tenter le spectacle le plus vertigineux et impossible de mysticisme et de subterfuge : réduire ces deux massifs ouvrages en à peine 150 pages ! »
Comme tout bon numéro de cirque, celui-ci est précédé de beaucoup d’annonces pour calibrer vos attentes. La différence ici est que l’objectif de notre préambule est d’abaisser vos attentes.
11.1Vue d’ensemble et autres remarques visant à réduire vos attentes
D’accord, il n’y a aucun moyen de couvrir toute la physique et le calcul en deux chapitres. Comme tout bon politicien le sait, le secret pour communiquer efficacement une matière complexe en peu de temps est d’utiliser des mensonges, tant par omission que par commission. Parlons de chacun de ces types de mensonges afin que vous sachiez ce qui vous attend réellement.
11.1.1Ce qui est laissé de côté
À peu près tout — commençons par ce que nous laissons de côté en physique. Mettre le mot « physique » sur ce chapitre serait encore plus insultant pour les personnes qui font de la vraie physique que ce chapitre ne l’est déjà. Nous nous intéressons uniquement à la mécanique, et à une mécanique très simple de corps rigides qui plus est. Parmi les sujets traditionnellement abordés dans un manuel de physique de première année qui ne sont pas traités dans ce livre, on trouve :
l’énergie et le travail
la température, le transfert de chaleur, la thermodynamique, l’entropie
l’électricité, le magnétisme, la lumière
les gaz, les fluides, la pression
les oscillations et les ondes.
Une remarque s’impose concernant l’énergie et le travail, car même dans le contexte limité de la mécanique, le concept fondamental d’énergie joue un rôle central dans les présentations traditionnelles. De nombreux problèmes sont plus faciles à résoudre en utilisant la conservation de l’énergie qu’en considérant les forces et en appliquant les lois de Newton. (En fait, il existe une alternative à la dynamique newtonienne que nous étudions dans ce livre. Elle est connue sous le nom de dynamique lagrangienne et se concentre sur l’énergie plutôt que sur les forces. Utilisés correctement, les deux systèmes produisent les mêmes résultats, mais la dynamique lagrangienne peut résoudre certains problèmes de manière plus élégante et est particulièrement habile pour traiter la friction, comparée à la dynamique newtonienne.) Cependant, au moment de la rédaction, les simulations numériques de base à usage général sont basées sur la dynamique newtonienne, et l’énergie n’y joue pas de rôle direct. Cela ne signifie pas qu’une compréhension de l’énergie soit inutile ; en fait, la violation de la loi de conservation de l’énergie est au cœur de nombreux problèmes de simulation ! Ainsi, l’énergie apparaît souvent davantage comme un moyen de comprendre le comportement (défectueux) d’une simulation numérique, même si elle n’apparaît pas directement dans le code de simulation.
Parlons maintenant des façons dont ce livre va irriter les professeurs de calcul. Nous pensons qu’une compréhension basique du calcul est vraiment importante pour saisir pleinement de nombreux concepts de physique. Inversement, la physique fournit certains des meilleurs exemples pour expliquer le calcul. Le calcul et la physique sont souvent enseignés séparément, généralement avec le calcul en premier. C’est notre avis que cela rend le calcul plus difficile à apprendre, car cela prive l’étudiant des exemples les plus intuitifs — les problèmes de physique pour lesquels le calcul a été inventé ! Nous espérons qu’entrelacer le calcul avec la physique facilitera votre apprentissage du calcul.
Nos besoins en calcul sont extrêmement modestes dans ce livre, et nous avons laissé de côté encore plus de calcul que de physique. Après avoir lu ce chapitre, vous devriez savoir :
L’idée de base de ce que mesure une dérivée et à quoi elle sert.
L’idée de base de ce que mesure une intégrale et à quoi elle sert.
Les dérivées et intégrales d’expressions triviales contenant des polynômes et des fonctions trigonométriques.
Bien sûr, nous savons qu’un grand nombre de lecteurs possèdent déjà ces connaissances. Prenez un moment pour vous classer dans l’une des catégories suivantes :
Je ne sais absolument rien sur les dérivées ou les intégrales.
Je connais l’idée de base des dérivées et des intégrales, mais je serais probablement incapable de résoudre un problème de calcul de première année avec un crayon et du papier.
J’ai étudié du calcul.
Le niveau 2 de connaissance du calcul est suffisant pour ce livre, et notre objectif est de faire passer en catégorie 2 tous ceux qui sont actuellement en catégorie 1. Si vous êtes en catégorie 3, nos discussions sur le calcul seront une révision (espérons-le divertissante). Nous n’avons pas la prétention de pouvoir faire passer en catégorie 3 quelqu’un qui n’y est pas déjà.
11.1.2Quelques mensonges utiles sur notre univers
L’univers est communément considéré comme discret à la fois dans l’espace et dans le temps. Non seulement la matière est divisée en morceaux discrets appelés atomes, mais il existe des preuves que le tissu même de l’espace et du temps est également divisé en pièces discrètes. Il existe une différence d’opinion quant à savoir si c’est vraiment ainsi ou si cela apparaît seulement de cette façon parce que la seule façon dont nous pouvons interagir avec l’espace est d’y lancer des particules, mais notre avis est que si ça ressemble à un canard, marche comme un canard, cancane comme un canard, a des pattes palmées et un bec, alors c’est une bonne hypothèse de travail que ça a bon goût dans des rouleaux de printemps avec un peu de sauce sombre.
Pendant longtemps, la simple idée que l’univers pourrait ne pas être continu n’avait même pas effleuré l’esprit de quiconque, jusqu’à ce que les Grecs anciens aient l’idée saugrenue et totalement injustifiée que les choses pourraient être faites d’atomes. Le fait que cela se soit avéré exact plus tard est considéré par beaucoup comme relevant davantage de la chance que du bon jugement. Franchement, qui l’aurait cru ? Après tout, les objets du quotidien, comme le bureau sur lequel l’un des auteurs pose ses poignets pendant qu’il tape cette phrase, donnent toute l’apparence d’avoir des surfaces lisses et continues. Mais qui s’en soucie ? Penser au bureau comme ayant une surface lisse et continue est une illusion inoffensive mais utile qui permet à l’auteur de poser ses poignets confortablement sans se préoccuper du tout de l’énergie de liaison atomique et de la théorie de l’incertitude quantique.
Non seulement cette astuce consistant à penser le monde comme continu est une rationalisation psychologique pratique, mais c’est aussi de bonnes mathématiques. Il s’avère que les mathématiques des choses continues sont beaucoup moins maniables que les mathématiques des choses discrètes. C’est pourquoi les personnes qui réfléchissaient au fonctionnement du monde au XVe siècle étaient heureuses d’inventer une mathématique pour un univers continu ; expérimentalement, c’était une bonne approximation de la réalité, et théoriquement les mathématiques fonctionnaient bien. Sir Isaac Newton a ainsi pu découvrir de nombreux résultats fondamentaux sur les mathématiques continues, que nous appelons « calcul », et son application à l’exploration d’un univers continu, que nous appelons « physique ».
Maintenant, nous faisons principalement cela pour pouvoir modéliser un monde de jeu dans un ordinateur, qui est intrinsèquement discret. Il y a une certaine dissonance cognitive à programmer une simulation discrète d’un modèle continu d’un univers discret, mais nous allons essayer de ne pas nous en préoccuper. Il suffit de dire que nous contrôlons entièrement l’univers discret à l’intérieur de notre jeu, ce qui signifie que nous pouvons choisir le type de physique qui s’applique dans cet univers. Tout ce dont nous avons besoin, c’est que les lois physiques ressemblent suffisamment à celles auxquelles nous sommes habitués pour que le joueur éprouve une suspension consentie de l’incrédulité, et espérons-le dise : « Wow ! Cool ! » et veuille dépenser plus d’argent. Pour presque tous les jeux, cela signifie un univers newtonien douillet sans les détails désagréables de la mécanique quantique ou de la relativité. Malheureusement, cela signifie aussi qu’il y a deux trolls désagréables qui rôdent sous le pont, répondant aux noms de chaos et d’instabilité, mais nous ferons de notre mieux pour les apaiser.
Pour l’instant, nous nous intéressons au mouvement d’un petit objet appelé « particule ». À tout moment donné, nous connaissons sa position et sa vitesse.1 La particule a une masse. Nous ne nous préoccupons pas de l’orientation de la particule (pour l’instant), et donc nous ne la considérons pas comme tournant sur elle-même. La particule n’a pas de taille non plus. Nous différerons l’ajout de ces éléments à plus tard, quand nous passerons des particules aux corps rigides.
Nous étudions la mécanique classique, également connue sous le nom de mécanique newtonienne, qui comporte plusieurs hypothèses simplificatrices incorrectes en général mais vraies dans la vie quotidienne dans la plupart des aspects qui nous importent. Nous pouvons donc nous assurer qu’elles sont vraies dans notre monde informatique, si nous le souhaitons. Ces hypothèses sont :
Le temps est absolu.
L’espace est euclidien.
Des mesures précises sont possibles.
L’univers présente une causalité et une prévisibilité complètes.
Les deux premières sont brisées par la relativité, et les deux dernières par la mécanique quantique. Heureusement, ces deux sujets ne sont pas nécessaires pour les jeux vidéo, car vos auteurs n’en ont qu’une compréhension superficielle.
Nous allons commencer notre incursion dans le domaine de la mécanique en apprenant la cinématique, qui est l’étude des équations décrivant le mouvement d’une particule dans des situations simples mais courantes. Lors de l’étude de la cinématique, nous ne nous préoccupons pas des causes du mouvement — c’est le sujet de la dynamique, qui sera couverte dans le Chapitre 12. Pour l’instant, « ce n’est pas à nous de demander pourquoi », il s’agit juste de faire les mathématiques pour obtenir des équations prédisant la position, la vitesse et l’accélération de la particule à tout moment , ou de mourir. Enfin, oublions cette dernière partie.
Parce que nous traitons nos objets comme des particules et que nous ne suivons que leur position, nous ne considérerons pas leur orientation ni les effets rotationnels avant le Chapitre 12. Lorsque la rotation est ignorée, toutes les idées de la cinématique linéaire s’étendent en 3D de manière simple, et pour l’instant nous nous limiterons à la 2D (et à la 1D). C’est pratique, car les auteurs ne savent pas comment concevoir ces petites choses origami qui s’aplatissent et surgissent quand on ouvre le livre, et l’éditeur ne nous laisserait pas faire même si nous étions assez compulsifs pour apprendre.
11.2Grandeurs de base et unités
La mécanique traite des relations entre trois grandeurs fondamentales de la nature : la longueur, le temps et la masse. La longueur est une grandeur que vous connaissez sans aucun doute ; nous la mesurons en centimètres, en pouces, en mètres, en pieds, en kilomètres, en miles et en unités astronomiques.2 Le temps est une autre grandeur que nous mesurons très aisément, en fait la plupart d’entre nous ont probablement appris à lire l’heure avant d’apprendre à mesurer des distances.3 Les unités utilisées pour mesurer le temps sont la seconde, la minute, le jour, la semaine, la quinzaine,4 et ainsi de suite. Le mois et l’année ne sont souvent pas de bonnes unités à utiliser pour le temps car les différents mois et années ont des durées différentes.
La grandeur masse n’est pas aussi intuitive que la longueur et le temps. La mesure de la masse d’un objet est souvent perçue comme mesurant la « quantité de matière » dans l’objet. Ce n’est pas une mauvaise définition (ou du moins, pas complètement terrible), mais elle n’est pas tout à fait correcte non plus [1]. Une définition plus précise pourrait être que la masse est une mesure de l’inertie, c’est-à-dire de la résistance d’un objet à être accéléré. Plus un objet est massif, plus il faut de force pour le mettre en mouvement, arrêter son mouvement ou modifier son mouvement.
La masse est souvent confondue avec le poids, d’autant plus que les unités utilisées pour mesurer la masse servent aussi à mesurer le poids : le gramme, la livre, le kilogramme, la tonne, etc. La masse d’un objet est une propriété intrinsèque de l’objet, tandis que le poids est un phénomène local qui dépend de l’intensité de l’attraction gravitationnelle exercée par un objet massif voisin. Votre masse sera la même que vous soyez à Chicago, sur la Lune, près de Jupiter ou à des années-lumière du corps céleste le plus proche, mais dans chacun de ces cas votre poids sera très différent. Dans ce livre et dans la plupart des jeux vidéo, nos préoccupations se limitent à un patch relativement petit sur une Terre plate, et nous approximons la gravité par une force constante vers le bas. Il ne sera pas trop dommageable de confondre masse et poids, car la gravité sera pour nous une constante. (Mais nous n’avons pas pu résister à quelques exercices intéressants sur la Station Spatiale Internationale.)
Dans de nombreuses situations, nous pouvons discuter de la relation entre les grandeurs fondamentales sans nous préoccuper des unités de mesure que nous utilisons. Dans de telles situations, nous trouverons utile de désigner la longueur, le temps et la masse par , et respectivement. Un cas important est la définition des grandeurs dérivées. Nous avons dit que la longueur, le temps et la masse sont les grandeurs fondamentales — mais qu’en est-il des autres grandeurs, comme l’aire, le volume, la densité, la vitesse, la fréquence, la force, la pression, l’énergie, la puissance ou n’importe laquelle des nombreuses grandeurs mesurables en physique ? Nous n’attribuons à aucune d’elles sa propre lettre majuscule, car chacune peut être définie en termes des grandeurs fondamentales.
Par exemple, nous pourrions exprimer une mesure de surface en nombre de « pieds carrés ». Nous avons créé une unité en termes d’une autre unité. En physique, nous disons qu’une mesure de surface a l’unité « longueur au carré », soit . Qu’en est-il de la vitesse ? Nous mesurons la vitesse en miles par heure ou en mètres par seconde. Ainsi la vitesse est le rapport d’une distance par unité de temps, soit .
Un dernier exemple est la fréquence. Vous savez probablement que la fréquence mesure combien de fois quelque chose se produit dans un intervalle de temps donné (à quelle « fréquence » cela arrive). Par exemple, un adulte en bonne santé a un rythme cardiaque moyen d’environ 70 battements par minute (BPM). Le moteur d’une voiture peut tourner à 5 000 tours par minute (RPM). La norme télévisuelle NTSC est définie à 29,97 images par seconde (FPS). Notez que dans chacun de ces cas, nous comptons combien de fois quelque chose se produit dans une durée donnée. Nous pouvons donc écrire la fréquence en unités génériques comme ou , que vous pouvez lire comme « par unité de temps ». L’une des mesures de fréquence les plus importantes est le Hertz, abrégé Hz, qui signifie « par seconde ». Lorsque vous exprimez une fréquence en Hz, vous décrivez le nombre d’événements, d’oscillations, de battements de cœur, d’images vidéo ou de quoi que ce soit d’autre par seconde. Par définition, .
Le Tableau 11.1 résume plusieurs grandeurs mesurées en physique, leur relation avec les grandeurs fondamentales, et quelques unités courantes utilisées pour les mesurer.
| Grandeur | Notation | Unité SI | Autres unités |
| Longueur | , , , , , année-lumière, furlong | ||
| Temps | , , | ||
| Masse | , slug, (livre-masse) | ||
| Vitesse | , , | ||
| Accélération | , , | ||
| Force | (Newton) = | (livre-force), poundal | |
| Aire | , , , , , , acre, hectare | ||
| Volume | , , L (litre), , , cuillère à café, oz liq. (once liquide), tasse, pinte, quart, gallon | ||
| Pression | Force/Aire = = | (Pascal) = = | ( ), millibar, pouce de mercure, (atmosphère) |
| Énergie | Force Longueur = = | (Joule) = = = | (kilowattheure), pied-livre, erg, calorie, (unité thermique britannique), tonne de TNT |
| Puissance | Énergie / Temps = = | (Watt) = = = | (cheval-vapeur) |
| Fréquence | = « par seconde » | , , « par minute », « par an » |
Tableau 11.1Grandeurs physiques sélectionnées et unités de mesure courantes
Bien entendu, toute mesure réelle n’a de sens qu’avec des unités spécifiques attachées. Une façon de s’assurer que vos calculs ont toujours un sens est de transporter les unités à tout moment et de les traiter comme des variables algébriques. Par exemple, si vous calculez une pression et que votre réponse ressort avec les unités m/s, vous savez que vous avez fait une erreur ; la pression a des unités de force par unité de surface, soit . En revanche, si vous résolvez un problème et obtenez une réponse en livres par pouce carré (psi), mais que vous cherchez une valeur en Pascals, votre réponse est probablement correcte mais doit juste être convertie dans les unités souhaitées. Ce type de raisonnement est connu sous le nom d’analyse dimensionnelle. Transporter les unités et les traiter comme des variables algébriques met souvent en évidence les erreurs causées par des unités de mesure différentes, et facilite également la conversion d’unités.
Puisque la conversion d’unités est une compétence importante, revoyons-la brièvement. Le concept de base est que pour convertir une mesure d’un ensemble d’unités à un autre, on multiplie cette mesure par une fraction bien choisie qui a la valeur 1. Prenons un exemple simple : combien de pieds font 14,57 mètres ? En cherchant le facteur de conversion,5 nous voyons que . Cela signifie que . Prenons donc notre mesure et multiplions-la par une « valeur spéciale » de 1 :
Notre facteur de conversion nous indique que le numérateur et le dénominateur de la fraction de l’Équation (11.1) sont égaux : 3,28083 pieds égalent 1 mètre. Comme le numérateur et le dénominateur sont égaux, la « valeur » de cette fraction est 1. (Au sens physique, bien sûr, la fraction n’égale pas numériquement 1.) Et nous savons que multiplier quelque chose par 1 ne change pas sa valeur. Parce que nous traitons les unités comme des variables algébriques, le m à gauche s’annule avec le m au bas de la fraction.
Bien sûr, appliquer un seul facteur de conversion simple n’est pas très difficile, mais considérons un exemple plus compliqué. Convertissons 188 km/h en ft/s. Cette fois nous devons multiplier par « 1 » plusieurs fois :
11.3Vitesse moyenne
Nous commençons notre étude de la cinématique en examinant de plus près le concept simple de vitesse. Comment mesure-t-on la vitesse ? La méthode la plus courante est de mesurer le temps qu’il faut pour parcourir une distance fixe. Par exemple, dans une course, nous disons que le coureur le plus rapide est celui qui franchit la ligne d’arrivée dans le temps le plus court.
Considérons la fable de la tortue et du lièvre. Dans l’histoire, ils décident de faire une course, et le lièvre, après avoir pris une avance rapide, devient trop confiant et se laisse distraire. Il s’arrête pendant la course pour faire une sieste, sentir les fleurs, ou quelque autre forme de flânerie. Pendant ce temps, la tortue avance patiemment, finit par dépasser le lièvre et franchit la ligne d’arrivée en premier. Or, c’est un livre de mathématiques et non un livre de développement personnel, aussi veuillez ignorer les leçons morales sur la concentration et la persévérance que l’histoire contient, et considérez plutôt ce qu’elle nous enseigne sur la vitesse moyenne. Examinez la Figure 11.1, qui représente la position de chaque animal au fil du temps.
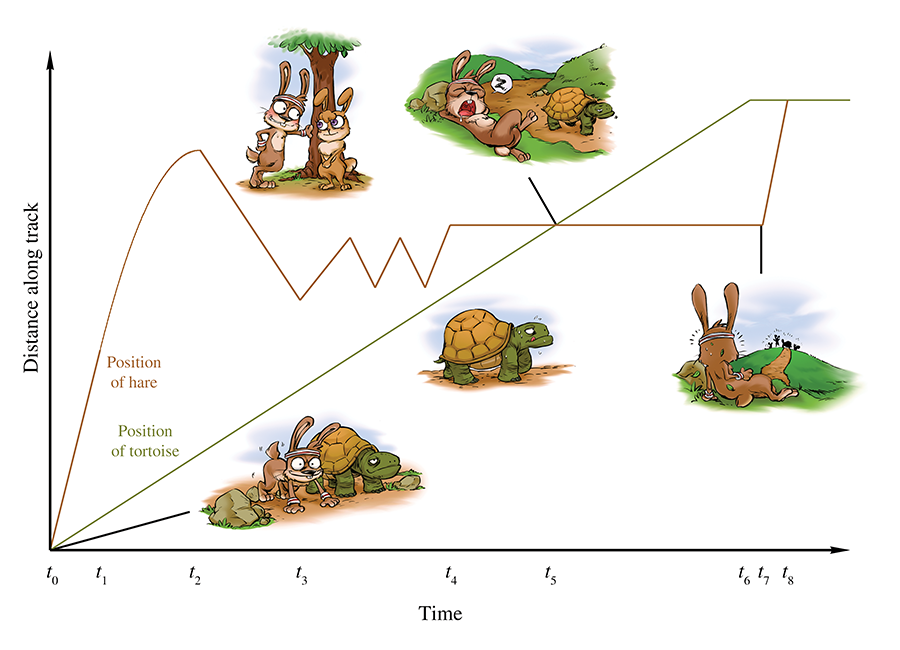
Figure 11.1 Graphe de la position en fonction du temps lors de la course entre la tortue et le lièvre
Voici le déroulement de la course. Le coup de feu part au temps , et le lièvre sprinte jusqu’au temps . À ce stade, son orgueil lui fait ralentir, jusqu’au temps où une jolie lapine passe en sens inverse. (Sa position au fil du temps n’est pas représentée dans le diagramme.) À ce stade, un autre trait masculin tragique pousse le lièvre à faire demi-tour et à marcher avec elle, et il entreprend de la courtiser. À , il réalise que ses avances ne mènent nulle part, et il commence à arpenter la piste de long en large, abattu, jusqu’au temps . À ce moment, il décide de faire une sieste. Pendant ce temps, la tortue progresse lentement mais sûrement, et au temps , elle rattrape le lièvre endormi. La tortue avance et franchit le fil d’arrivée à . Peu après, le lièvre, peut-être réveillé par le bruit de la foule célébrant la victoire de la tortue, se réveille à et se précipite frénétiquement vers l’arrivée. À , le lièvre franchit la ligne d’arrivée, où il est humilié par tous ses pairs, et par la jolie lapine aussi.
Pour mesurer la vitesse moyenne de l’un ou l’autre animal pendant n’importe quel intervalle de temps, on divise le déplacement de l’animal par la durée de l’intervalle. Nous allons nous concentrer sur le lièvre, et nous noterons la position du lièvre , ou plus explicitement , pour souligner le fait que la position du lièvre varie en fonction du temps. Il est courant d’utiliser la lettre grecque majuscule delta (« ») comme préfixe pour signifier « variation de ». Par exemple, signifierait « la variation de la position du lièvre », c’est-à-dire un déplacement du lièvre. De même, signifie « la variation du temps actuel », ou simplement « temps écoulé entre deux instants ». En utilisant cette notation, la vitesse moyenne du lièvre de à est donnée par l’équation
Définition de la vitesse moyenne
C’est la définition de la vitesse moyenne. Quelles que soient les unités spécifiques utilisées, la vitesse décrit toujours le rapport d’une longueur divisée par un temps, ou pour utiliser la notation discutée dans la Section 11.2, la vitesse est une grandeur avec les unités .
Si nous traçons une droite passant par deux points quelconques sur le graphe de la position du lièvre, la pente de cette droite mesure la vitesse moyenne du lièvre sur l’intervalle entre les deux points. Par exemple, considérons la vitesse moyenne du lièvre au moment où il décélère du temps à , comme indiqué dans la Figure 11.2. La pente de la droite est le rapport . Cette pente est également égale à la tangente de l’angle marqué , bien que pour l’instant les valeurs et soient celles que nous aurons sous la main, donc nous n’aurons pas besoin de faire de trigonométrie.
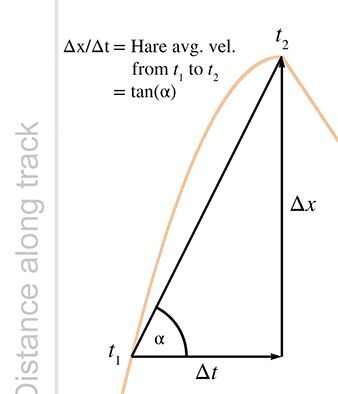
Figure 11.2Détermination graphique de la vitesse moyenne
En revenant à la Figure 11.1, remarquez que la vitesse moyenne du lièvre de à est négative. En effet, la vitesse est définie comme le rapport du déplacement net sur le temps. Comparez cela à la rapidité, qui est la distance totale divisée par le temps et ne peut pas être négative. Le signe du déplacement et de la vitesse sont sensibles à la direction du déplacement, alors que la distance et la rapidité sont intrinsèquement non négatives. Nous avons déjà évoqué ces distinctions bien plus tôt dans Section 2.2. Bien sûr, il est évident que la vitesse moyenne est négative entre et , puisque le lièvre reculait pendant tout l’intervalle. Mais la vitesse moyenne peut aussi être négative sur un intervalle même dans des situations où une progression en avant est réalisée pendant une partie de l’intervalle, comme le plus grand intervalle entre et . C’est un cas de « un pas en avant, deux pas en arrière ».
La vitesse moyenne peut aussi être nulle, comme illustré pendant la sieste du lièvre de à . En fait, la vitesse moyenne sera nulle chaque fois qu’un objet commence et finit au même endroit, même s’il était en mouvement pendant tout l’intervalle ! (« Deux pas en avant, deux pas en arrière. ») Deux tels intervalles sont illustrés dans la Figure 11.3.
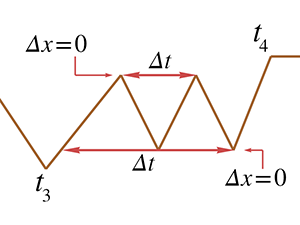
Figure 11.3 Deux intervalles pendant lesquels le lièvre n’a aucun déplacement net, et donc sa vitesse moyenne est nulle
Et bien sûr, la leçon finale de la fable est que la vitesse moyenne de la tortue est supérieure à la vitesse moyenne du lièvre, du moins de à , quand la tortue franchit la ligne d’arrivée. Cela est vrai malgré le fait que la rapidité moyenne du lièvre était plus élevée, puisqu’il a certainement parcouru une plus grande distance avec toutes les distractions féminines et les allées et venues.
Une dernière chose à souligner. Si nous supposons que le lièvre a tiré les leçons de son expérience et félicité la tortue (après tout, n’attribuons pas au pauvre animal tous les traits de personnalité négatifs !), alors à ils se trouvaient au même endroit. Cela signifie que leurs déplacements nets de à sont identiques, et donc qu’ils ont la même vitesse moyenne pendant cet intervalle.
11.4Vitesse instantanée et la dérivée
Nous avons vu comment la physique définit et mesure la vitesse moyenne d’un objet sur un intervalle, c’est-à-dire entre deux valeurs de temps qui diffèrent d’une quantité finie . Cependant, il est souvent utile de pouvoir parler de la vitesse instantanée d’un objet, c’est-à-dire la vitesse de l’objet pour une valeur de , un seul instant dans le temps. On voit que ce n’est pas une question triviale car les méthodes habituelles pour mesurer la vitesse, telles que
ne fonctionnent pas quand on considère un seul instant dans le temps. Que sont et quand on ne regarde qu’une seule valeur de temps ? En un seul instant, le déplacement et le temps écoulé sont tous deux nuls ; quel est donc le sens du rapport ? Cette section introduit un outil fondamental du calcul connu sous le nom de dérivée. La dérivée a été inventée par Newton pour étudier précisément les questions de cinématique que nous posons dans ce chapitre. Cependant, son applicabilité s’étend à pratiquement tous les problèmes où une grandeur varie en fonction d’une autre grandeur. (Dans le cas de la vitesse, nous nous intéressons à la façon dont la position varie en fonction du temps.)
Étant donné le vaste éventail de problèmes auxquels la dérivée peut être appliquée, Newton n’était pas le seul à l’avoir étudiée. Les applications primitives du calcul intégral pour calculer des volumes remontent à l’Égypte antique. Dès le Ve siècle, les Grecs exploraient les éléments constitutifs du calcul comme les infinitésimaux et la méthode d’exhaustion. Newton partage généralement le mérite avec le mathématicien allemand Gottfried Leibniz6 (1646–1716) pour avoir inventé le calcul au XVIIe siècle, bien que des écrits persans et indiens contiennent des exemples de concepts de calcul utilisés. De nombreux autres penseurs ont apporté des contributions significatives, dont Fermat, Pascal et Descartes.7 Il est assez intéressant de constater que nombre des premières applications du calcul portaient sur les intégrales, même si la plupart des cours de calcul couvrent la dérivée « plus facile » avant l’intégrale « plus difficile ».
Nous suivons d’abord les traces de Newton et commençons par l’exemple physique de la vitesse, que nous considérons comme le meilleur exemple pour acquérir de l’intuition sur le fonctionnement de la dérivée. Ensuite, nous considérons plusieurs autres exemples où la dérivée peut être utilisée, en passant du physique à l’abstrait.
11.4.1Arguments de limite et la définition de la dérivée
Retour à la question posée : comment mesurer la vitesse instantanée ? Observons d’abord une situation particulière pour laquelle c’est facile : si un objet se déplace à vitesse constante sur un intervalle, alors la vitesse est la même à chaque instant de l’intervalle. C’est la définition même de la vitesse constante. Dans ce cas, la vitesse moyenne sur l’intervalle doit être la même que la vitesse instantanée pour tout point de cet intervalle. Dans un graphe comme la Figure 11.1, il est facile de déterminer quand l’objet se déplace à vitesse constante car le graphe est une droite. En fait, presque toute la Figure 11.1 est composée de segments de droite,8 donc déterminer la vitesse instantanée est aussi simple que de choisir deux points quelconques sur un intervalle rectiligne (les extrémités de l’intervalle semblent un bon choix, mais deux points quelconques feront l’affaire) et de déterminer la vitesse moyenne entre ces extrémités.
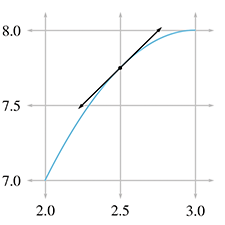
Mais considérons l’intervalle de à , pendant lequel la confiance excessive du lièvre l’amène à décélérer progressivement. Sur cet intervalle, le graphe de la position du lièvre est une courbe, ce qui signifie que la pente de la droite, et donc la vitesse du lièvre, change continuellement. Dans cette situation, mesurer la vitesse instantanée demande un peu plus de finesse.
Pour plus de clarté dans cet exemple, attribuons des nombres particuliers. Pour garder ces nombres ronds (et aussi pour rester dans le thème des courses), permettez le choix fantaisiste de mesurer le temps en minutes et la distance en furlongs.9 Nous posons et , la durée totale est donc de 2 minutes. Disons que pendant cet intervalle, le lièvre parcourt de à .10 À des fins d’illustration, nous visons la réponse à la question : quelle est la vitesse instantanée du lièvre à ? Tout ceci est représenté dans la Figure 11.4.
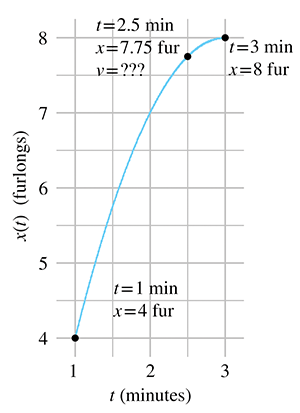
Figure 11.4 Quelle est la vitesse du lièvre à ?
Il n’est pas immédiatement évident comment mesurer ou calculer la vitesse au moment exact , mais observons que nous pouvons obtenir une bonne approximation en calculant la vitesse moyenne d’un très petit intervalle près de . Pour un intervalle suffisamment petit, le graphe ressemble presque à un segment de droite, et la vitesse est presque constante, donc la vitesse instantanée à tout instant donné dans l’intervalle ne sera pas très éloignée de la vitesse moyenne sur tout l’intervalle.
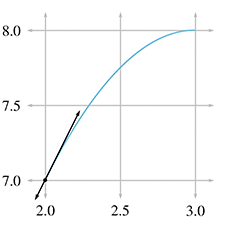
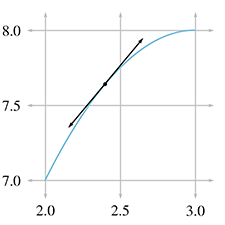
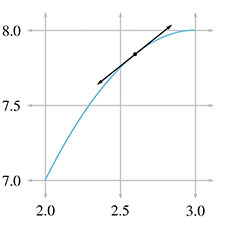
Dans la Figure 11.5, nous fixons l’extrémité gauche d’un segment à et déplaçons l’extrémité droite de plus en plus près. Comme vous pouvez le voir, plus l’intervalle est court, plus le graphe ressemble à une droite, et meilleure est notre approximation. En pensant graphiquement, à mesure que le deuxième point se rapproche de plus en plus de , la pente de la droite entre les deux points convergera vers la pente de la droite tangente à la courbe en ce point. Une droite tangente est l’équivalent graphique de la vitesse instantanée, car elle mesure la pente de la courbe exactement en ce seul point.
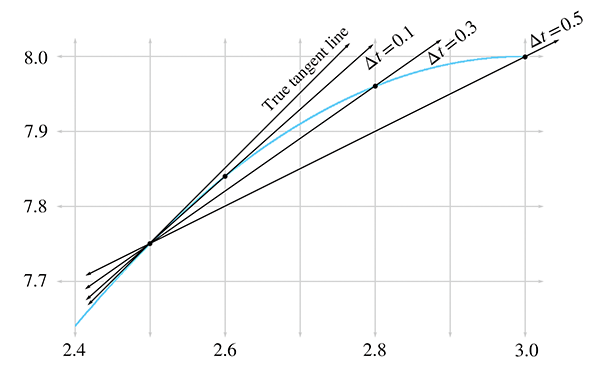
Figure 11.5 Approximation de la vitesse instantanée comme vitesse moyenne d’un intervalle de plus en plus petit
Effectuons cette expérience avec de vrais nombres et voyons si nous pouvons approcher la vitesse instantanée du lièvre. Pour ce faire, nous aurons besoin de connaître la position du lièvre à tout instant donné, il est donc temps de vous dire que la position du lièvre est donnée par la fonction11
Le Tableau 11.2 montre des calculs tabulés de vitesse moyenne sur des intervalles avec une extrémité droite qui se rapproche de plus en plus de .
La colonne la plus à droite, qui représente la vitesse moyenne, semble converger vers une vitesse de 1 furlong/minute. Mais dans quelle mesure sommes-nous certains que c’est la valeur correcte ? Bien qu’il n’existe aucun calcul qui produira une vitesse résultante exactement égale à 1 furlong/minute, à toutes fins pratiques, nous pouvons atteindre n’importe quel degré de précision souhaité en utilisant cette technique d’approximation et en choisissant suffisamment petit. (Nous ignorons les problèmes liés à la précision de la représentation en virgule flottante des nombres dans un ordinateur.)
| [6pt] 2.500 | 0.500 | 3.000 | 7.750 | 8.0000 | 0.2500 | 0.5000 |
| 2.500 | 0.100 | 2.600 | 7.750 | 7.8400 | 0.0900 | 0.9000 |
| 2.500 | 0.050 | 2.550 | 7.750 | 7.7975 | 0.0475 | 0.9500 |
| 2.500 | 0.010 | 2.510 | 7.750 | 7.7599 | 0.0099 | 0.9900 |
| 2.500 | 0.005 | 2.505 | 7.750 | 7.7549 | 0.0049 | 0.9950 |
| 2.500 | 0.001 | 2.501 | 7.750 | 7.7509 | 0.0009 | 0.9990 |
Tableau 11.2Calcul de la vitesse moyenne pour des intervalles de durées variées
C’est un argument puissant. Nous avons essentiellement attribué une valeur à une expression que nous ne pouvons pas évaluer directement. Bien qu’il soit mathématiquement illégal de substituer dans l’expression, nous pouvons soutenir que pour des valeurs de plus en plus petites de , nous convergeons vers une valeur particulière. Dans le jargon du calcul, cette valeur de 1 furlong/minute est une valeur limite, ce qui signifie que lorsque nous prenons des valeurs positives de plus en plus petites pour , le résultat de notre calcul approche 1, sans le dépasser (ni l’atteindre exactement).
Les arguments de convergence tels que celui-ci sont définis rigoureusement en calcul en utilisant un outil formalisé connu sous le nom de limite. La notation mathématique pour cela est
La notation « » se lit généralement « approche » ou « tend vers ». Donc le côté droit de l’Équation (11.2) pourrait se lire
ou
En général, une expression de la forme est interprétée comme signifiant « La valeur vers laquelle [truc] converge, quand se rapproche de plus en plus de . »
C’est une idée importante, car elle définit ce que nous entendons par vitesse instantanée.
La vitesse instantanée à un temps donné peut être interprétée comme la vitesse moyenne d’un intervalle contenant , dans la limite où la durée de l’intervalle tend vers zéro.
Nous n’aurons pas grand besoin d’explorer toute la puissance des limites ni de nous enliser dans les détails ; c’est le domaine mathématique de l’analyse, et nous entraînerait un peu trop loin de nos objectifs actuels, plutôt limités.12 Nous passons sous silence certains détails importants13 pour pouvoir nous concentrer sur un cas particulier : l’utilisation des limites pour définir la dérivée.
La dérivée mesure le taux de variation d’une fonction. Rappelons que « fonction » n’est qu’un terme savant pour désigner toute formule, calcul ou procédure qui prend une entrée et produit une sortie. La dérivée quantifie le taux auquel la sortie de la fonction changera en réponse à une variation de l’entrée. Si désigne la valeur d’une fonction à un temps spécifique , la dérivée de cette fonction en est le rapport . Le symbole représente la variation de la sortie produite par une très petite variation de l’entrée, représentée par . Nous en dirons plus sur ces « petites variations » dans un instant.
Pour l’instant, nous sommes sur un circuit imaginaire où des lapins et des tortues font la course et où des leçons morales sont enseignées par métaphore. Nous avons une fonction avec une entrée , le nombre de minutes écoulées depuis le début de la course, et une sortie , la distance du lièvre sur le circuit. La règle que nous utilisons pour évaluer notre fonction est l’expression . La dérivée de cette fonction nous indique le taux de variation de la position du lièvre par rapport au temps et constitue la définition de la vitesse instantanée. Juste avant, nous avons défini la vitesse instantanée comme la vitesse moyenne prise sur des intervalles de plus en plus petits, mais c’est essentiellement la même chose que la définition de la dérivée. Nous avons simplement formulé les choses la première fois en utilisant une terminologie spécifique à la position et à la vitesse.
Lorsque nous calculons une dérivée, nous n’obtenons pas un seul nombre. Attendre que la réponse à « Quelle est la vitesse du lièvre ? » soit un seul nombre n’a de sens que si la vitesse est la même partout. Dans un tel cas trivial, nous n’avons pas besoin de dérivées, nous pouvons utiliser la vitesse moyenne. La situation intéressante se produit quand la vitesse varie dans le temps. Lorsque nous calculons la dérivée d’une fonction de position dans de tels cas, nous obtenons une fonction de vitesse, ce qui nous permet de calculer la vitesse instantanée à tout moment.
Les trois paragraphes précédents expriment les concepts les plus importants de cette section, aussi permettez-nous de les répéter.
Une dérivée mesure un taux de variation. Puisque la vitesse est le taux de variation de la position par rapport au temps, la dérivée de la fonction de position est la fonction de vitesse.
Les prochaines sections discutent des mathématiques des dérivées de manière un peu plus détaillée, et nous revenons à la cinématique dans la Section 11.5. Ce matériel est destiné à ceux qui n’ont pas14 suivi le calcul de première année. Si vous avez déjà une formation en calcul, vous pouvez passer directement à la Section 11.5, sauf si vous souhaitez un rappel.
La Section 11.4.2 liste plusieurs exemples de dérivées pour vous donner une meilleure compréhension de ce que signifie mesurer un taux de variation, et aussi pour appuyer notre affirmation selon laquelle la dérivée a une applicabilité très large. La Section 11.4.3 donne la définition mathématique formelle de la dérivée15 et montre comment utiliser cette définition pour résoudre des problèmes. Nous allons enfin déterminer la vitesse du lièvre à . La Section 11.4.4 liste diverses notations alternatives couramment utilisées pour les dérivées, et enfin, la Section 11.4.5 liste juste assez de règles sur les dérivées pour satisfaire les besoins en calcul différentiel très modestes de ce livre.
11.4.2Exemples de dérivées
La vitesse est peut-être l’introduction la plus facile à la dérivée, mais ce n’est certainement pas le seul exemple. Examinons d’autres exemples pour vous donner une idée du large éventail de problèmes auxquels la dérivée est appliquée.
Les types d’exemples les plus simples consistent à considérer d’autres grandeurs qui varient avec le temps. Par exemple, si est la lecture d’un pluviomètre à un temps donné , alors la dérivée, notée , décrit l’intensité de la pluie au temps . Peut-être que est la lecture d’une soupape de pression sur un réservoir contenant un type de gaz. En supposant que la lecture de pression est proportionnelle à la masse du gaz dans la chambre,16 le taux de variation indique la vitesse à laquelle le gaz entre ou sort de la chambre au temps .
Il existe aussi des exemples physiques pour lesquels la variable indépendante n’est pas le temps. Le cas prototypique est une fonction qui donne la hauteur d’une surface au-dessus d’un point de référence à la position horizontale . Par exemple, peut être la distance le long de notre circuit métaphorique et mesure la hauteur en ce point au-dessus ou en dessous de l’altitude au point de départ. La dérivée de cette fonction est la pente de la surface en , où les pentes positives signifient que les coureurs montent, et les valeurs négatives indiquent une portion descendante de la course. Cet exemple n’est pas vraiment nouveau, car nous avons examiné des graphes de fonctions et considéré comment la dérivée mesure la pente du graphe en 2D.
Devenons maintenant un peu plus abstraits, tout en gardant une dimension physique comme variable indépendante. Disons que pour un mur d’escalade populaire, nous connaissons une fonction qui décrit, pour une hauteur donnée , quel pourcentage des grimpeurs est capable d’atteindre cette hauteur ou davantage. Si nous supposons que les grimpeurs commencent à , alors . Clairement est une fonction non croissante qui finit par descendre jusqu’à 0% à une hauteur maximale que personne n’a jamais atteinte.
Considérons maintenant l’interprétation de la dérivée . Bien sûr, , puisque est non croissante. Une grande valeur négative de indique que la hauteur est une zone où les grimpeurs ont tendance à lâcher17. Peut-être que le mur à cette hauteur est une zone difficile. proche de zéro indique que moins de grimpeurs abandonnent à la hauteur . Peut-être y a-t-il un plateau que les grimpeurs peuvent atteindre, et là ils se reposent. On pourrait s’attendre à ce que diminue juste après ce plateau, car les grimpeurs sont plus reposés. En fait, pourrait aussi se rapprocher de zéro juste avant le plateau, car à mesure que les grimpeurs commencent à approcher de ce jalon, ils poussent un peu plus fort et sont plus réticents à abandonner.18
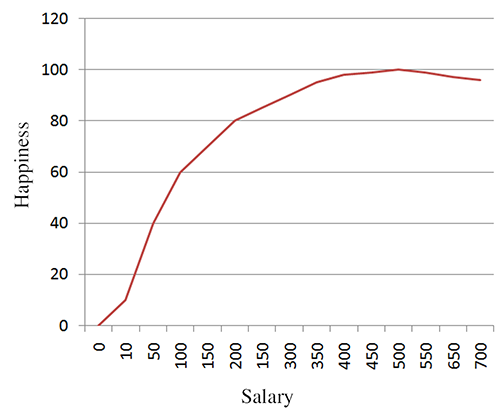
Figure 11.6Bonheur en fonction du salaire
Un dernier exemple. La Figure 11.6 montre le bonheur en fonction du salaire. Dans ce cas, la dérivée est essentiellement la même chose que ce que les économistes appelleraient l’« utilité marginale ». C’est le rapport d’unités supplémentaires de bonheur par unité supplémentaire de revenu. Selon cette figure, l’utilité marginale du revenu diminue, ce qui est bien sûr la célèbre loi des rendements décroissants. Selon nos recherches,19 elle devient même négative après un certain point, où les problèmes associés à un revenu élevé commencent à l’emporter sur les avantages psychologiques. L’expression économique « utilité marginale négative » se traduit en langage courant par « arrêtez de faire ça ».
11.4.3Calcul des dérivées à partir de la définition
Nous sommes maintenant prêts pour la définition20 officielle de la dérivée que l’on trouve dans la plupart des manuels de mathématiques, et pour voir comment nous pouvons calculer des dérivées en utilisant la définition. Une dérivée peut être comprise comme la valeur limite de , le rapport de la variation de la sortie divisée par la variation de l’entrée, prise quand nous rendons infinitésimalement petit. Répétons cette description en notation mathématique. C’est une équation que nous avons donnée plus tôt dans le chapitre, mais cette fois nous la mettons dans un grand cadre, car c’est ce que font les manuels de mathématiques avec les équations qui sont des définitions.
La Définition d’une Dérivée
Ici, la notation pour la dérivée est connue sous le nom de notation de Leibniz. Les symboles et sont connus sous le nom d’infinitésimaux. Contrairement à et , qui sont des variables représentant des variations finies de valeur, et sont des symboles représentant « une variation infinitésimalement petite ». Pourquoi est-il si important d’utiliser une très petite variation ? Pourquoi ne peut-on pas simplement prendre le rapport directement ? Parce que le taux de variation varie continuellement. Même sur un très petit intervalle de , il n’est pas constant. C’est pourquoi un argument de limite est utilisé, pour rendre l’intervalle aussi petit que possible — infinitésimalement petit.
Dans certaines circonstances, les infinitésimaux peuvent être manipulés comme des variables algébriques (et vous pouvez aussi y attacher des unités de mesure et effectuer une analyse dimensionnelle pour vérifier votre travail). Le fait que de telles manipulations soient souvent correctes est ce qui donne à la notation de Leibniz son attrait intuitif. Cependant, parce qu’ils sont des valeurs infiniment petites, ils nécessitent une manipulation spéciale, similaire au symbole , et ne doivent donc pas être utilisés à la légère. La plupart du temps, nous interprétons la notation non pas comme un rapport de deux variables, mais comme un seul symbole signifiant « la dérivée de par rapport à ». C’est la procédure la plus sûre et elle évite tout risque d’utilisation intempestive précédemment mentionnée. Nous aurons plus à dire sur Leibniz et d’autres notations plus loin, mais d’abord, calculons enfin une dérivée et répondons à la question brûlante : à quelle vitesse le lièvre voyageait-il à ?
Différencier une fonction simple en utilisant la définition Équation (11.3) est un rite de passage important, et nous sommes fiers de vous aider à franchir ce seuil. La procédure typique est la suivante :
Substituer et dans la définition. (Dans notre cas, ).
Effectuer des manipulations algébriques jusqu’à ce qu’il soit légal de substituer . (Cela revient souvent à éliminer du dénominateur.)
Substituer , ce qui évalue l’expression « à la limite », supprimant la notation de limite.
Simplifier le résultat.
L’application de cette procédure à notre cas donne
Nous sommes maintenant à l’étape 3. Prendre la limite de l’ Équation (11.4) est maintenant facile ; nous substituons simplement . Cette substitution n’était pas légale auparavant car il y avait un au dénominateur :
 |
 |
 |
 |
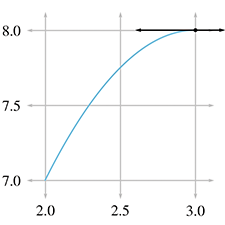 |
Figure 11.7La vitesse du lièvre et la droite tangente correspondante à des instants sélectionnés
Enfin ! L’Équation (11.5) est la fonction de vitesse que nous cherchions. Elle nous permet d’insérer n’importe quelle valeur de et de calculer la vitesse instantanée du lièvre à cet instant. En substituant , nous obtenons la réponse à notre question :
Ainsi, la vitesse instantanée du lièvre à était précisément 1 furlong par minute, exactement comme nos arguments précédents l’avaient prédit. Mais maintenant nous pouvons l’affirmer avec confiance.
La Figure 11.7 montre ce point et plusieurs autres le long de l’intervalle étudié. Pour chaque point, nous avons calculé la vitesse instantanée en ce point selon l’Équation (11.5) et avons tracé la droite tangente avec la même pente.
Il est très instructif de comparer côte à côte les graphes de position et de vitesse. La Figure 11.8 compare la position et la vitesse de nos coureurs légendaires.
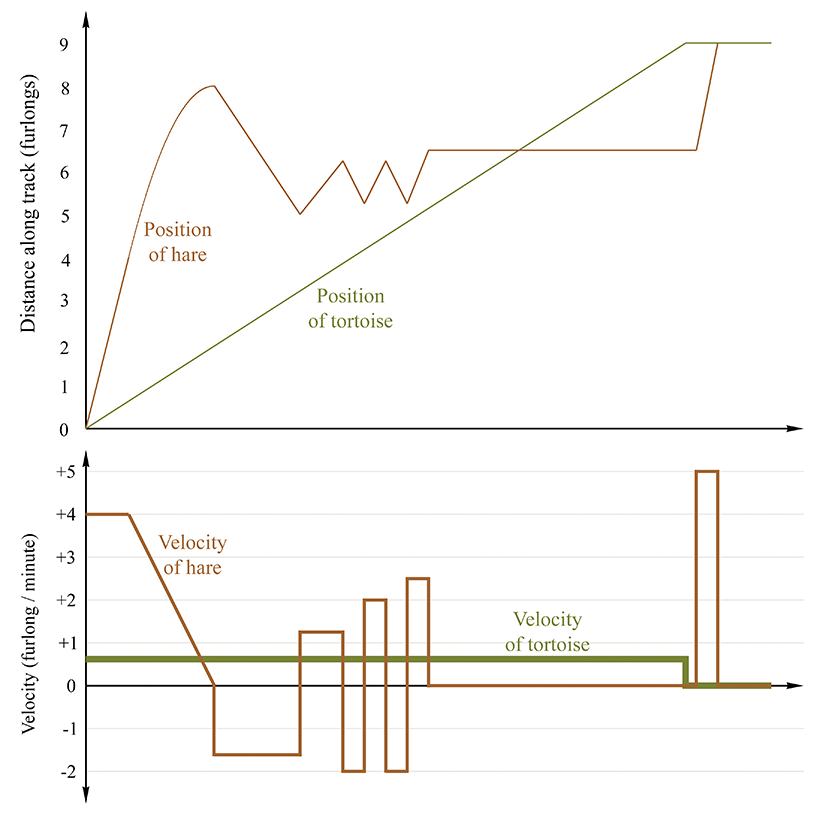
Figure 11.8 Comparaison de la position et de la vitesse
Plusieurs observations intéressantes peuvent être faites à propos de la Figure 11.8.
Quand le graphe de position est une ligne horizontale, la vitesse est nulle, et le graphe de vitesse suit l’axe horizontal (par exemple, pendant la sieste du lièvre).
Quand la position augmente, la vitesse est positive, et quand la position diminue (le lièvre recule) la vitesse est négative.
Quand le graphe de position est une droite, cette vitesse constante est indiquée par une ligne horizontale dans le graphe de vitesse.
Quand le graphe de position est courbé, la vitesse change continuellement, et le graphe de vitesse ne sera pas une ligne horizontale. Dans ce cas, le graphe de vitesse est une droite, mais plus loin nous examinerons des situations où le graphe de vitesse est une courbe.
Quand la fonction de position change de pente à un « coude », le graphe de vitesse présente une discontinuité. En fait, la dérivée en de tels points n’existe pas, et il n’y a aucun moyen de définir la vitesse instantanée en ces points de discontinuité. Heureusement, de telles situations sont non physiques — dans le monde réel, il est impossible pour un objet de changer sa vitesse instantanément. Les changements de vitesse se produisent toujours via une accélération sur une durée (potentiellement brève, mais finie).21 Plus loin, nous montrerons que de telles accélérations rapides sur de courtes durées sont souvent approximées par des impulsions.
Il y a des sections sur le graphe de vitesse qui se ressemblent, même si les intervalles correspondants sur le graphe de position sont différents. C’est parce que la dérivée mesure uniquement le taux de variation d’une variable. La valeur absolue de la fonction n’a pas d’importance. Si nous ajoutons une constante à une fonction, ce qui produit un décalage vertical du graphe de cette fonction, la dérivée ne sera pas affectée. Nous en dirons plus quand nous parlerons de la relation entre la dérivée et l’intégrale.
À ce stade, il convient de reconnaître quelques façons dont notre explication de la dérivée diffère de la plupart des manuels de calcul. Notre approche a été de se concentrer sur un exemple spécifique, celui de la vitesse instantanée. Cela a conduit à quelques différences cosmétiques, comme la notation. Mais il y avait aussi de nombreux points subtils que nous passons sous silence. Par exemple, nous n’avons pas pris la peine de définir les fonctions continues, ni de donner des définitions rigoureuses pour quand la dérivée est définie et quand elle ne l’est pas. Nous avons discuté de l’idée derrière ce qu’est une limite, mais n’avons pas fourni de définition formelle ni considéré les limites approchées par la gauche et par la droite, et les critères d’existence d’une limite bien définie. Nous pensons que commencer par le meilleur exemple intuitif est toujours la façon optimale d’enseigner quelque chose, même si cela signifie « mentir » au lecteur un court moment. Si nous écrivions un manuel de calcul, nous reviendrions à ce stade pour corriger certains de nos mensonges, en passant en revue les points plus subtils et en donnant des définitions plus précises.
Cependant, comme ceci n’est pas un manuel de calcul, nous vous avertirons seulement que ce qui précède est la vue d’ensemble, mais n’est pas suffisant pour gérer de nombreux cas limites lorsque les fonctions font des choses étranges comme partir à l’infini ou présenter des « sauts » ou des « lacunes ». Heureusement, de tels cas limites ne surviennent pas trop souvent pour des fonctions qui modélisent des phénomènes physiques, et ces détails ne deviendront pas un problème pour nous dans le contexte de la physique.
Nous avons bien la place, cependant, de mentionner des notations alternatives pour la dérivée que vous êtes susceptible de rencontrer.
11.4.4Notations pour la dérivée
Plusieurs notations différentes pour les dérivées sont couramment utilisées. Indiquons quelques façons dont d’autres textes pourraient se présenter différemment de ce que nous avons présenté ici. Tout d’abord, il y a une question triviale de dénomination. La plupart des manuels de calcul définissent la dérivée en termes très généraux, où la variable de sortie est nommée , le symbole désigne la variable d’entrée plutôt que la variable de sortie, et la fonction est simplement nommée . En d’autres termes, la fonction à différencier est . De plus, beaucoup assignent la « quantité de pas » décroissante à la variable plutôt que d’utiliser la notation , ce qui présente des avantages lors de la résolution des équations résultant du calcul des dérivées à partir de la définition.22 Avec ces variables, ils définiraient la dérivée comme
Définition d’une dérivée en utilisant les variables de la plupart des manuels de calcul
Les différences entre les Équations (11.3) et (11.6) sont clairement cosmétiques.
Une variante de la notation de Leibniz que nous préférons dans ce livre est de préfixer une expression par pour signifier « la dérivée par rapport à de cette chose à droite ». Par exemple
peut se lire comme « la dérivée par rapport à de ». C’est une notation très descriptive et intuitive. Si nous appelons l’expression à droite , et interprétons la juxtaposition de symboles comme une multiplication, nous pouvons ramener le en haut de la fraction pour retrouver notre notation originale, comme dans
Il est important d’interpréter ces manipulations comme des manipulations notionnelles plutôt que comme ayant une vraie signification mathématique. La notation est attrayante parce que de telles manipulations algébriques avec les infinitésimaux fonctionnent souvent. Mais nous réitérons notre mise en garde contre l’attribution d’une trop grande signification mathématique à de telles opérations.
Une autre notation courante consiste à désigner la dérivée d’une fonction avec un prime : . C’est ce qu’on appelle la notation prime ou notation de Lagrange. Elle est utilisée quand la variable indépendante par rapport à laquelle on différencie est implicite ou comprise par le contexte. En utilisant cette notation, nous définirions la vitesse comme la dérivée de la fonction de position par .
Une dernière notation, inventée par Newton et principalement utilisée quand la variable indépendante est le temps (comme dans les équations physiques inventées par Newton), est la notation point. Une dérivée est indiquée en plaçant un point au-dessus de la variable ; par exemple, .
Voici un résumé des différentes notations pour la dérivée que vous rencontrerez, en utilisant la vitesse et la position comme exemple :
11.4.5Quelques règles et raccourcis de différenciation
Revenons maintenant au calcul des dérivées. En pratique, il est rarement nécessaire de revenir à la définition de la dérivée pour différencier une expression. Au lieu de cela, il existe des règles simplificatrices qui permettent de décomposer des fonctions complexes en morceaux plus petits qui peuvent ensuite être différenciés. Il existe aussi des fonctions spéciales, comme et , pour lesquelles le travail difficile d’appliquer la définition a déjà été fait et consigné dans ces tableaux qui garnissent l’intérieur des couvertures des manuels de calcul. Pour différencier des expressions contenant de telles fonctions, on se réfère simplement au tableau (bien que nous allions faire un peu de ce « travail difficile » nous-mêmes pour le sinus et le cosinus).
Dans ce livre, nos préoccupations se limitent aux dérivées d’un très petit ensemble de fonctions, qui peuvent heureusement être différenciées avec quelques règles simples. Malheureusement, nous n’avons pas la place ici pour développer les justifications mathématiques derrière ces règles, aussi allons-nous simplement accompagner chaque règle d’une brève explication de son utilisation, et d’un argument intuitif (mathématiquement non rigoureux) pour vous aider à vous convaincre qu’elle fonctionne.
Notre première règle, connue sous le nom de règle des constantes, stipule que la dérivée d’une fonction constante est zéro. Une fonction constante est une fonction qui produit toujours la même valeur. Par exemple, est une fonction constante. Vous pouvez substituer n’importe quelle valeur de , et cette fonction produit la valeur 3. Puisque la dérivée mesure la rapidité avec laquelle la sortie d’une fonction change en réponse aux changements de l’entrée , dans le cas d’une fonction constante, la sortie ne change jamais, et donc la dérivée est .
La Règle des Constantes
La règle suivante, parfois appelée règle de la somme, dit que la différenciation est un opérateur linéaire. La signification de « linéaire » est essentiellement identique à notre définition donnée dans le Chapitre 5, mais revoyons-la dans le contexte de la dérivée. Dire que la dérivée est un opérateur linéaire signifie deux choses. Premièrement, pour prendre la dérivée d’une somme, on peut prendre la dérivée de chaque morceau individuellement, et additionner les résultats. C’est intuitif — le taux de variation d’une somme est le taux de variation total de toutes les parties additionnées. Par exemple, considérons un homme qui se déplace sur un train. Sa position dans l’espace monde peut être décrite comme la somme de la position du train, plus la position de l’homme dans l’espace corps du train.23 De même, sa vitesse par rapport au sol est la somme de la vitesse du train par rapport au sol, plus sa vitesse par rapport au train.
Dérivée d’une Somme
La deuxième propriété de la linéarité est que si nous multiplions une fonction par une constante, la dérivée de cette fonction est multipliée par cette même constante. Une façon simple de voir que cela doit être vrai est de considérer les conversions d’unités. Revenons à notre fonction favorite qui donne le déplacement d’un lièvre en fonction du temps, mesuré en furlongs. En prenant la dérivée de cette fonction par rapport au temps, on obtient une vitesse en furlongs par minute. Si quelqu’un ne veut pas utiliser les furlongs, on peut passer des furlongs aux mètres en multipliant la fonction de position originale par un facteur de 201,168. Cela doit multiplier la dérivée par le même facteur, sinon le lièvre changerait soudainement de vitesse juste parce que nous avons changé d’unité.
Dérivée d’une Fonction Multipliée par une Constante
Si nous combinons les Équations (11.7) et (11.8), nous pouvons énoncer la règle de linéarité de manière plus générale.
La Règle de la Somme
La propriété linéaire de la dérivée est très importante car elle nous permet de décomposer de nombreuses fonctions courantes en morceaux plus petits et plus faciles.
L’une des fonctions les plus importantes et les plus courantes qui doivent être différenciées est aussi la plus facile : le polynôme. En utilisant la propriété linéaire de la dérivée, nous pouvons décomposer, par exemple, un polynôme de degré 4 avec facilité :
La dernière dérivée est nulle par la règle des constantes, puisque ne varie pas. Il nous reste quatre dérivées simples, dont chacune peut être insérée dans la définition de la dérivée, Équation (11.3), sans trop de difficulté. Résoudre chacune de ces quatre individuellement est considérablement plus facile qu’insérer le polynôme original dans l’Équation (11.3). Si vous faites cet exercice (comme tout étudiant de première année en calcul), vous remarquez deux choses. Premièrement, la fastidiosité algébrique augmente à mesure que la puissance de s’élève. Deuxièmement, un motif assez évident se révèle, connu sous le nom de règle de la puissance.
La Règle de la Puissance
Cette règle nous donne les réponses aux quatre dérivées nécessaires ci-dessus :
Notez que dans la dernière équation, nous avons utilisé l’identité . Cependant, même sans cette identité,24 il devrait être très clair que doit être égal à l’unité. Rappelons que la dérivée répond à la question : « Quel est le taux de variation de la sortie, par rapport au taux de variation de l’entrée ? » Dans le cas de , la « sortie » et l’« entrée » sont toutes deux la variable , et donc leurs taux de variation sont égaux. Ainsi, le rapport qui définit la dérivée est égal à un.
Un dernier commentaire avant d’insérer ces résultats dans l’ Équation (11.9) pour différencier notre polynôme. En utilisant l’identité , la règle de la puissance est mise en harmonie avec la règle des constantes :
Dérivée d’une constante, en utilisant la règle de la puissance
Revenons à notre polynôme de degré 4. Avec la règle de la somme et la règle de la puissance à notre disposition, nous pouvons l’expédier rapidement :
Voici plusieurs autres exemples de l’utilisation de la règle de la puissance. Notez que la règle de la puissance fonctionne aussi pour les exposants négatifs :
11.4.6Dérivées de quelques fonctions spéciales avec les séries de Taylor
Cette section examine quelques exemples très spéciaux de différenciation de polynômes. Étant donné une fonction arbitraire , la série de Taylor de est une façon d’exprimer comme un polynôme. Chaque terme successif du polynôme est déterminé en prenant une dérivée d’ordre supérieur de la fonction, ce qui est peut-être le point principal des séries de Taylor que vous devriez apprendre quand vous suivrez un vrai cours de calcul, mais pour l’instant nous ne nous intéressons pas à l’origine des séries de Taylor, simplement au fait qu’elles existent. La série de Taylor est un outil très utile dans les jeux vidéo car elle fournit des approximations polynomiales, « faciles » à évaluer par un ordinateur, pour des fonctions qui sont autrement « difficiles » à évaluer. Nous n’avons pas la place pour discuter de beaucoup de choses sur les séries de Taylor en général, mais nous aimerions examiner quelques exemples importants de séries de Taylor. Les séries de Taylor pour les fonctions sinus et cosinus sont
Séries de Taylor pour et
Ce motif se poursuit indéfiniment ; en d’autres termes, calculer la valeur exacte de nécessiterait d’évaluer un nombre infini de termes. Cependant, notez que les dénominateurs des termes croissent très rapidement, ce qui signifie que nous pouvons approximer simplement en nous arrêtant après un certain nombre de termes et en ignorant le reste.
C’est exactement le processus par lequel les fonctions trigonométriques sont calculées dans un ordinateur. Premièrement, des identités trigonométriques sont utilisées pour ramener l’argument dans une plage restreinte (puisque les fonctions sont périodiques). Cela est fait parce que lorsque la série de Taylor est tronquée, sa précision est la plus grande près d’une valeur particulière de , et dans le cas des fonctions trigo, ce point est généralement choisi comme étant .25 Ensuite, le polynôme de série de Taylor avec, disons, quatre termes est évalué. Cette approximation est très précise. S’arrêter au terme est suffisant pour calculer à environ cinq virgules et demie pour .
Toutes ces anecdotes sur les approximations sont intéressantes, mais notre vraie raison d’introduire les séries de Taylor est de les utiliser comme exemples non triviaux de différenciation de polynômes avec la règle de la puissance, et aussi pour apprendre des faits intéressants sur les fonctions sinus, cosinus et exponentielle. Utilisons la règle de la puissance pour différencier le développement en série de Taylor de . Ce n’est pas si compliqué — nous devons juste différencier chaque terme séparément. Nous ne sommes même pas intimidés par le fait qu’il y a un nombre infini de termes :
Différenciation de la série de Taylor de
Dans la dérivation ci-dessus, nous avons d’abord utilisé la règle de la somme, qui dit que pour différencier tout le polynôme de Taylor, nous pouvons différencier chaque terme individuellement. Ensuite, nous avons appliqué la règle de la puissance à chaque terme, en multipliant à chaque fois par l’exposant et en le décrémentant de un. (Et en se rappelant aussi que pour le premier terme.) Pour comprendre la dernière étape, rappelons la définition de l’opérateur factoriel : . Ainsi, la constante au numérateur de chaque terme annule le facteur le plus élevé de la factorielle au dénominateur.
L’Équation (11.11) vous semble-t-elle familière ? Elle devrait, car c’est la même que l’Équation (11.10), la série de Taylor pour . En d’autres termes, nous connaissons maintenant la dérivée de , et par un processus similaire nous pouvons aussi obtenir la dérivée de . Énonçons ces faits formellement.26
Dérivées du Sinus et du Cosinus
Les dérivées des fonctions sinus et cosinus deviendront utiles dans les sections suivantes.
Examinons maintenant une autre fonction spéciale importante qui jouera un rôle important plus loin dans ce livre, qu’il sera pratique de pouvoir différencier, et qui a aussi une belle série de Taylor bien ordonnée. La fonction dont nous parlons est la fonction exponentielle, notée . La constante mathématique possède de nombreuses propriétés bien connues et intéressantes, et apparaît dans toutes sortes de problèmes, de la finance au traitement du signal. Une grande partie du statut spécial de est liée à la nature unique de la fonction . Une manifestation de cette nature unique est que a une série de Taylor si belle :
Série de Taylor de
En prenant la dérivée, on obtient
Mais ce résultat est équivalent à la définition de de l’ Équation (11.12) ; la seule différence entre eux est la question cosmétique du moment où arrêter d’énumérer les termes explicitement et de terminer par « ». En d’autres termes, la fonction exponentielle est sa propre dérivée : . La fonction exponentielle est la seule fonction pouvant se vanter de cette propriété unique. (Pour être plus précis, tout multiple de la fonction exponentielle, y compris zéro, possède cette qualité.)
La Fonction Exponentielle est sa Propre Dérivée
C’est cette propriété spéciale de la fonction exponentielle qui la rend unique et lui fait apparaître si fréquemment dans les applications. Chaque fois que le taux de variation d’une valeur est proportionnel à la valeur elle-même, la fonction exponentielle surgira presque certainement quelque part dans les mathématiques qui décrivent la dynamique du système.
L’exemple que la plupart d’entre nous connaissent est celui des intérêts composés. Que soit la somme d’argent sur votre compte bancaire au temps ; supposons que la somme accumule des intérêts. Le taux de variation par intervalle de temps — le montant des intérêts gagnés — est proportionnel au montant d’argent sur votre compte. Plus vous avez d’argent, plus vous gagnez d’intérêts, et plus il croît vite. Ainsi, la fonction exponentielle s’introduit dans la finance avec l’équation , qui décrit le montant d’argent à tout instant , en supposant qu’un montant initial croît à un taux d’intérêt , les intérêts étant composés en continu.
Vous avez peut-être remarqué que la série de Taylor de ressemble frappamment aux représentations en série de et . Cette similarité laisse entrevoir une relation profonde et surprenante entre les fonctions exponentielles et les fonctions trigonométriques, que nous explorons dans l’ Exercice 11.
Nous espérons que cette brève rencontre avec les séries de Taylor, bien que quelque peu en dehors de notre fil conducteur principal, a éveillé votre intérêt pour un outil mathématique qui est très pratique, notamment pour son importance fondamentale dans toutes sortes de calculs d’approximation et numériques sur ordinateur. Nous espérons également que c’était un exemple non trivial intéressant de différenciation d’un polynôme. Cela nous a aussi donné l’occasion de discuter des dérivées des fonctions sinus, cosinus et exponentielle ; ces dérivées réapparaîtront dans les sections ultérieures.
11.4.7La règle de la chaîne
La règle de la chaîne est la dernière règle de différenciation que nous abordons ici. Elle nous dit comment déterminer le taux de variation d’une fonction quand l’argument de cette fonction est lui-même une autre fonction que nous savons différencier.
Dans la course entre la tortue et le lièvre, nous n’avons jamais vraiment réfléchi à ce que mesurait exactement notre fonction , nous avons simplement dit que c’était la « position » du lièvre. Supposons que le circuit était en réalité un parcours sinueux avec des collines, des ponts et même une boucle verticale, et que la fonction que nous avons représentée et précédemment nommée mesure en fait la distance linéaire le long de ce chemin sinueux, plutôt que, disons, une position horizontale. Pour éviter les connotations horizontales associées au symbole , introduisons la variable , qui donne la distance le long du circuit (en furlongs, bien sûr).
Disons que nous avons une fonction qui décrit l’altitude du circuit à une distance donnée. La dérivée nous indique des informations très basiques sur le circuit à cet endroit. Une valeur nulle signifie que le circuit est plat à cet endroit, une valeur positive signifie que les coureurs montent une côte, et une grande valeur positive ou négative indique un endroit où le circuit est très pentu.
Considérons maintenant la fonction composite . Vous devriez pouvoir vous convaincre que cela nous indique l’altitude du lièvre à tout moment donné. La dérivée nous dit à quelle vitesse le lièvre se déplaçait verticalement, à un moment donné. C’est très différent de . Comment pourrait-on calculer ? Vous pourriez être tenté de dire que pour faire cette détermination, il suffit de savoir où se trouvait le lièvre sur le circuit au temps , puis la réponse est la pente du circuit à cet endroit. En symboles mathématiques, vous dites que la vitesse verticale est . Mais ce n’est pas correct. Par exemple, pendant que le lièvre faisait sa sieste (), peu importe la pente du circuit ; puisqu’il ne se déplaçait pas dessus, sa vitesse verticale est nulle ! En fait, à un certain moment de la course il a fait demi-tour et a couru sur le circuit dans la mauvaise direction (), donc sa vitesse verticale serait opposée à la pente du circuit . Et évidemment, s’il sprinte rapidement sur un endroit du circuit, sa vitesse verticale sera plus élevée que s’il marchait lentement sur ce même endroit. Mais de même, là où le circuit est plat, peu importe la vitesse à laquelle il court, sa vitesse verticale sera nulle. Nous voyons donc que la vitesse verticale du lièvre est le produit de sa vitesse (mesurée paramétriquement le long du circuit) et de la pente du circuit en ce point.
Cette règle est connue sous le nom de règle de la chaîne. Elle est particulièrement intuitive lorsqu’elle est écrite en notation de Leibniz, car les infinitésimaux semblent « s’annuler ».
La Règle de la Chaîne de Différenciation
Voici quelques exemples, utilisant des fonctions que nous savons maintenant différencier :
Exemples de la règle de la chaîne
Nous allons mettre le calcul d’un point de vue purement mathématique de côté pour un moment et revenir à la cinématique. (Après tout, notre but en discutant du calcul était, comme Isaac Newton, d’améliorer notre compréhension de la mécanique.) Cependant, il ne tardera pas à revenir sur le tapis avec la discussion de l’intégrale et du théorème fondamental du calcul.
11.5Accélération
Nous avons beaucoup insisté sur la distinction entre vitesse instantanée et vitesse moyenne, et cette distinction est importante (et l’insistance est justifiée) quand la vitesse change continuellement. Dans de telles situations, nous pourrions vouloir connaître le taux auquel la vitesse change. Heureusement, nous venons d’apprendre la dérivée, dont la raison d’être est d’étudier les taux de variation. Quand nous prenons la dérivée d’une fonction de vitesse , nous obtenons une nouvelle fonction décrivant à quelle vitesse la vitesse augmente ou diminue à cet instant. Ce taux de variation instantané est une grandeur importante en physique, et elle porte un nom familier : l’accélération.
Dans la conversation courante, le verbe « accélérer » signifie généralement « aller plus vite ». Cependant, en physique, le mot « accélération » a une signification plus générale et peut désigner tout changement de vitesse, pas seulement une augmentation de rapidité. En fait, un corps peut subir une accélération même quand sa rapidité est constante ! Comment est-ce possible ? La vitesse est une valeur vectorielle, ce qui signifie qu’elle a à la fois une magnitude et une direction. Si la direction de la vitesse change, mais pas sa magnitude (sa rapidité), nous disons que le corps éprouve une accélération. Une telle terminologie n’est pas de la simple chicane sur les mots ; l’accélération dans ce cas est une sensation très réelle qui serait ressentie, par exemple, par deux personnes assises à l’arrière d’une voiture qui zigzague et qui se retrouvent pressées l’une contre l’autre d’un côté. Nous en dirons plus sur cette situation particulière dans la Section 11.8.
Nous pouvons apprendre beaucoup sur l’accélération en nous demandant simplement quels types d’unités nous devons utiliser pour la mesurer. Pour la vitesse, nous avons utilisé les unités génériques , longueur unitaire par unité de temps. La vitesse est un taux de variation de position () par unité de temps (), ce qui est logique. L’accélération est le taux de variation de la vitesse par unité de temps, et doit donc être exprimée en « vitesse unitaire par unité de temps ». En fait, les unités utilisées pour mesurer l’accélération sont . Si vous êtes troublé par l’idée de « temps au carré », pensez-y plutôt comme à , ce qui rend plus explicite le fait qu’il s’agit d’une unité de vitesse par unité de temps.
Par exemple, un objet en chute libre près de la surface de la Terre accélère à un taux d’environ , ou . Disons que vous suspendez une bille métallique au bord de la Willis Tower.27 Vous lâchez la bille, et elle commence à accélérer, ajoutant à sa vitesse vers le bas chaque seconde. (Nous ignorons la résistance de l’air.) Après, disons, 2,4 secondes, sa vitesse sera
Plus généralement, la vitesse à un temps arbitraire d’un objet sous accélération constante est donnée par la formule linéaire simple
où est la vitesse initiale au temps , et est l’accélération constante. Nous étudions le mouvement des objets en chute libre plus en détail dans la Section 11.6, mais d’abord, examinons une représentation graphique de l’accélération. La Figure 11.9 montre les graphes d’une fonction de position et des fonctions de vitesse et d’accélération correspondantes.
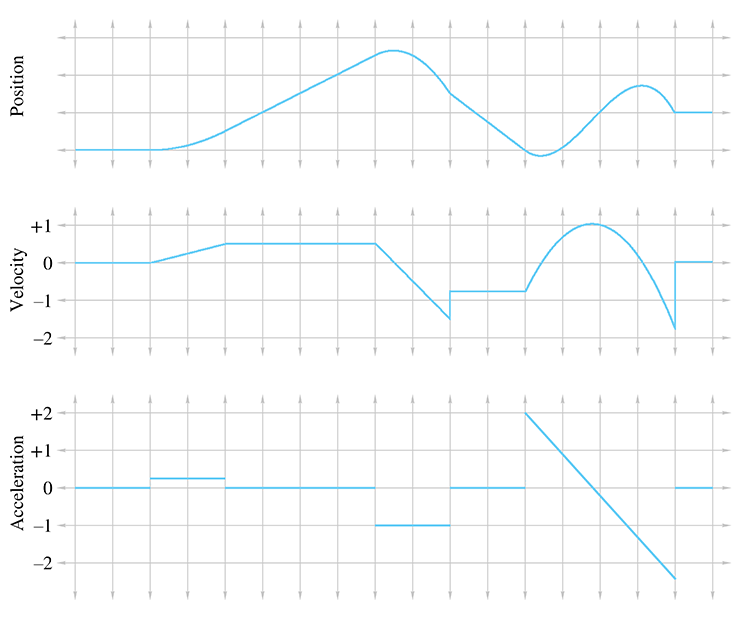
Figure 11.9 Graphes de la position, de la vitesse et de l’accélération en fonction du temps.
Vous devriez étudier la Figure 11.9 jusqu’à ce qu’elle vous soit compréhensible. Voici notamment quelques observations dignes d’intérêt :
Là où l’accélération est nulle, la vitesse est constante et la position est une droite (mais éventuellement inclinée).
Là où l’accélération est positive, le graphe de position est courbé en , et là où elle est négative, le graphe de position est courbé en . L’exemple le plus intéressant se produit sur le côté droit des graphes. Notez qu’au moment où le graphe d’accélération franchit , la courbe de vitesse atteint son apogée, et la courbe de position passe de à .
Une discontinuité dans la fonction de vitesse provoque un « coude » dans le graphe de position. De plus, elle fait devenir infinie l’accélération (en fait, indéfinie), ce qui explique pourquoi, comme nous l’avons dit précédemment, de telles discontinuités ne se produisent pas dans le monde réel. C’est pourquoi les lignes dans le graphe de vitesse sont connectées à ces discontinuités, car le graphe représente une situation physique approximée par un modèle mathématique.
Une discontinuité dans le graphe d’accélération provoque un coude dans le graphe de vitesse, mais notez que le graphe de position est toujours lisse. En fait, l’accélération peut changer instantanément, et pour cette raison nous avons choisi de ne pas combler les discontinuités dans le graphe d’accélération.
Les accélérations subies par un objet peuvent varier en fonction du temps, et nous pouvons continuer ce processus de différenciation, ce qui donne encore une autre fonction du temps, que certains appellent la fonction de « secousse » (jerk). Dans ce livre, nous nous en tenons à la fonction de position et à ses deux premières dérivées. De plus, il est très instructif de considérer des situations dans lesquelles l’accélération est constante (ou du moins a une magnitude constante). C’est précisément ce que nous allons faire dans les prochaines sections.
La Section 11.6 considère les objets sous accélération constante, comme les objets en chute libre et les projectiles. Cela fournira un excellent contexte pour introduire l’intégrale, le complément de la dérivée, dans la Section 11.7. Ensuite, la Section 11.8 examine les objets se déplaçant sur un trajet circulaire, qui subissent une accélération de magnitude constante mais de direction changeant continuellement et pointant toujours vers le centre du cercle.
11.6Mouvement sous accélération constante
Examinons maintenant la trajectoire que suit un objet quand il accélère à un taux constant dans le temps. C’est un cas simple, mais fréquent, et important à bien comprendre. En fait, les équations du mouvement que nous présentons dans cette section sont parmi les équations mécaniques les plus importantes à connaître par cœur, surtout pour la programmation de jeux vidéo.
Avant de commencer, considérons un type de mouvement encore plus simple — le mouvement à vitesse constante. Le mouvement à vitesse constante est un cas particulier du mouvement à accélération constante — le cas où l’accélération est constamment nulle. Le mouvement d’une particule à vitesse constante est une équation linéaire intuitive, essentiellement identique à l’ Équation (9.1), l’équation d’un rayon. En une dimension, la position d’une particule en fonction du temps est
où est la position de la particule au temps , et est la vitesse constante.
Considérons maintenant les objets se déplaçant avec une accélération constante. Nous avons déjà mentionné au moins un exemple important : quand ils sont en chute libre, accélérant en raison de la gravité. (Nous ignorons la résistance de l’air et toutes les autres forces.) Le mouvement en chute libre est souvent appelé mouvement balistique. Nous commençons en une dimension pour garder les choses simples. Notre objectif est une formule pour la position d’une particule à un moment donné.
Reprenons notre exemple du lancer illégal de billes depuis la Willis Tower. Établissons un référentiel où augmente dans la direction vers le bas, et . En d’autres termes, mesure la distance que l’objet a parcourue depuis sa hauteur de lâcher au temps . Nous supposons aussi pour l’instant que la vitesse initiale est , ce qui signifie que vous relâchez simplement la bille sans la lancer.
À ce stade, nous ne savons même pas quelle forme devrait prendre , nous sommes donc un peu bloqués. La « porte d’entrée » vers cette solution semble verrouillée pour nous en ce moment, aussi essayons de contourner par l’arrière, en utilisant une approche similaire à celle que nous avons utilisée plus tôt pour définir la vitesse instantanée. Nous considérerons des façons d’approximer la réponse et observerons ce qui se passe quand les approximations deviennent de plus en plus précises.
Tableau 11.3Valeurs pour différents nombres de tranches
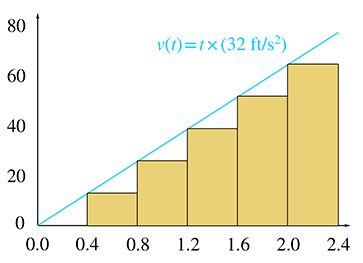
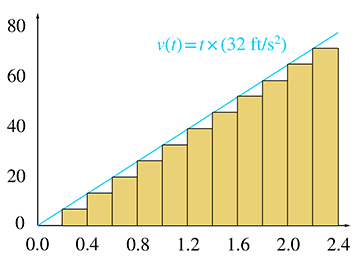
Rendons notre exemple un peu plus spécifique. Plus tôt, nous avons calculé qu’après 2,4 secondes de chute libre, la bille aurait une vitesse de . Cependant, nous n’avons pas dit combien de distance elle avait parcouru pendant ce temps. Essayons de calculer cette distance, qui est . Pour ce faire, nous découpons l’intervalle total de 2,4 secondes en un certain nombre de plus petites « tranches » de temps, et approximons la distance que parcourt la bille pendant chaque tranche. Nous pouvons approximer la distance totale parcourue comme la somme des distances parcourues pendant chaque tranche. Pour approximer la distance parcourue par la bille pendant une seule tranche, nous calculons d’abord la vitesse de la bille au début de la tranche en utilisant l’ Équation (11.13). Nous approximons ensuite la distance parcourue pendant la tranche en insérant cette vitesse comme vitesse constante pour la tranche dans l’ Équation (11.14).
Le Tableau 11.3 montre les valeurs tabulées pour 6, 12 et 24 tranches. Pour chaque tranche, désigne le temps de début de la tranche, est la vitesse au début de la tranche (calculée selon l’ Équation (11.13) comme ), est la durée de la tranche, et est notre approximation du déplacement pendant la tranche (calculée selon l’Équation (11.14) comme ).
Puisque chaque tranche a une vitesse initiale différente, nous tenons compte du fait que la vitesse change sur l’ensemble de l’intervalle. (En fait, le calcul de la vitesse initiale de la tranche n’est pas une approximation — il est exact.) Cependant, comme nous ignorons le changement de vitesse à l’intérieur d’une tranche, notre réponse n’est qu’une approximation. En prenant de plus en plus de tranches, nous obtenons des approximations de plus en plus précises, bien qu’il soit difficile de voir vers quelle valeur ces approximations convergent. Examinons le problème graphiquement pour voir si nous pouvons avoir un aperçu.
Dans la Figure 11.10, chaque rectangle représente un intervalle de temps dans notre approximation. Notez que la distance parcourue pendant un intervalle est la même que l’aire du rectangle correspondant :
  |
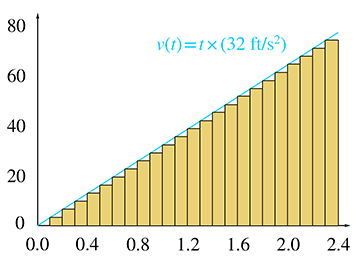 |
Figure 11.10Représentation graphique du Tableau 11.3
Voici maintenant l’observation clé. En augmentant le nombre de tranches, l’aire totale des rectangles se rapproche de plus en plus de l’aire du triangle sous la courbe de vitesse. À la limite, en prenant un nombre infini de rectangles, les deux aires seront égales. Puisque le déplacement total de la bille en chute libre est égal à l’aire totale des rectangles, qui est égale à l’aire sous la courbe, nous sommes conduits à une découverte importante.
La distance parcourue est égale à l’aire sous la courbe de vitesse.
Nous sommes arrivés à cette conclusion en utilisant un argument de limite très similaire à celui que nous avons utilisé pour définir la vitesse instantanée — nous considérons comment une série d’approximations converge dans la limite quand l’erreur d’approximation tend vers zéro.
Notez que nous n’avons fait aucune hypothèse dans cet argument sur . Dans l’exemple en cours, c’est une simple fonction linéaire, et le graphe est une droite ; cependant, vous devriez pouvoir vous convaincre que cette procédure fonctionnera pour toute fonction de vitesse arbitraire.28 Cet argument de limite est un outil formalisé en calcul connu sous le nom d’intégrale de Riemann, que nous considérerons dans la Section 11.7. Ce sera aussi le moment approprié pour considérer le cas général de tout . Cependant, puisqu’il y a tant de choses à apprendre de cet exemple spécifique, gardons-le simple aussi longtemps que possible.
Rappelons la question à laquelle nous essayons de répondre : quelle distance parcourt un objet après avoir été lâché à une vitesse initiale nulle, puis accéléré par la gravité pendant 2,4 secondes à un taux constant de ? Comment cette nouvelle réalisation sur l’équivalence entre la distance parcourue et l’aire sous le graphe de nous aide-t-elle ? Dans ce cas particulier, est une simple fonction linéaire, et l’aire sous la courbe de à est un triangle. C’est une forme dont nous savons facilement calculer l’aire. La base de ce triangle a une longueur , et la hauteur est , donc l’aire est
Ainsi, en seulement 2,4 secondes, la bille avait déjà chuté de plus de 92 pieds !
Cela résout le problème spécifique posé, mais soyons plus généraux. Rappelons que l’objectif plus large était une équation cinématique qui prédit la position d’un objet en fonction d’une position initiale et d’une vitesse initiale quelconques. Premièrement, remplaçons la constante 2,4 par un temps arbitraire . Ensuite, supprimons l’hypothèse que l’objet a initialement une vitesse nulle, et permettons une vitesse initiale arbitraire . Cela signifie que l’aire sous la courbe n’est plus un triangle — c’est un triangle posé sur un rectangle, comme indiqué dans la Figure 11.11.
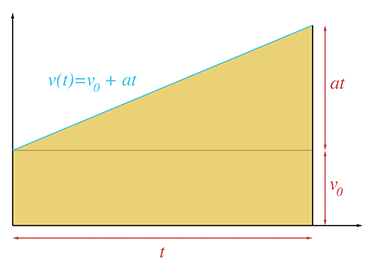
Figure 11.11 Calcul du déplacement au temps , avec une vitesse initiale et une accélération constante
Le rectangle a une base et une hauteur , et son aire représente la distance qui serait parcourue s’il n’y avait pas d’accélération. Le triangle au-dessus du rectangle a aussi une base , et la hauteur est , la différence de par rapport à la vitesse initiale résultant de l’accélération au taux sur la durée de secondes. En additionnant ces deux parties, on obtient le déplacement total, que nous notons :
Nous venons de dériver une équation très utile, mettons-la en valeur pour que les lecteurs qui parcourent le texte la remarquent.
Formule du Déplacement avec Vitesse Initiale et Accélération Constante
L’Équation (11.15) fait partie d’une poignée d’équations dans ce livre qui valent la peine d’être mémorisées. Elle est très utile pour résoudre des problèmes pratiques qui se posent dans les simulations physiques.29
Il est courant que nous n’ayons besoin que du déplacement , et que la position absolue n’ait pas d’importance. Cependant, puisque la fonction était notre objectif déclaré, nous pouvons facilement l’exprimer en termes de l’Équation (11.15) en ajoutant le déplacement à notre position initiale, que nous notons :
Travaillons sur quelques exemples pour montrer les types de problèmes qui peuvent être résolus en utilisant l’ Équation (11.15) et ses variantes. Un scénario tentant est de laisser notre bille toucher le sol. La plate-forme d’observation au 103e étage de la Willis Tower est à 1 353 pieds au-dessus du trottoir. Si elle est lâchée de cette hauteur, combien de temps mettra-t-elle pour tomber jusqu’en bas ? En résolvant l’ Équation (11.15) pour , nous obtenons
Résolution pour le temps
L’Équation (11.16) est une équation générale très utile. En insérant les valeurs spécifiques à ce problème, nous obtenons
La racine carrée dans l’ Équation (11.16) introduit la possibilité de deux solutions. Nous utilisons toujours la racine qui donne une valeur positive pour .30
Naturellement, une personne qui s’adonne au lancer de billes depuis de grandes hauteurs s’intéresse aux dégâts qu’elle peut causer, aussi la prochaine question logique est : « À quelle vitesse la bille voyage-t-elle quand elle touche le trottoir ? » Pour répondre à cette question, nous insérons le temps de trajet total dans l’ Équation (11.13) :
Si nous ignorons la résistance de l’air, au moment de l’impact, la bille voyage à une vitesse qui couvre une distance d’environ un terrain de football en une seconde ! On comprend pourquoi ce que nous faisons dans notre imagination est illégal dans la réalité. Continuons quand même.
Supposons maintenant qu’au lieu de simplement lâcher la bille, nous lui donnons une vitesse initiale (nous la lançons vers le haut ou vers le bas). C’était notre libre choix de décider si le haut ou le bas est positif dans ces exemples, et nous avons choisi pour la direction vers le bas, ce qui signifie que la vitesse initiale sera négative. Quelle doit être la vitesse initiale pour que la bille reste en l’air quelques secondes de plus, disons un total de 12 secondes ? Une fois encore, nous allons d’abord manipuler l’ Équation (11.15) pour obtenir une solution générale ; cette fois, nous résolvons pour :
Résolution pour la vitesse initiale
En insérant maintenant les valeurs spécifiques à notre problème, nous obtenons
Notez que le résultat est négatif, indiquant une vitesse vers le haut. Si nous donnons cette vitesse initiale à la bille, nous pourrions nous demander combien de temps il lui faut pour revenir à sa position initiale. En utilisant l’ Équation (11.16) et en posant , nous obtenons
Il n’est pas surprenant que soit une solution ; nous résolvions pour les valeurs de temps quand la bille se trouvait à sa position initiale.
Examinez le graphe de la Figure 11.12, qui représente la position et la vitesse d’un objet se déplaçant sous accélération constante avec une vitesse initiale , où et ont des signes opposés. Faisons trois observations clés. Bien que nous utilisions des termes comme « hauteur », qui sont spécifiques au mouvement de projectile, des affirmations similaires sont vraies chaque fois que les signes de et sont opposés.
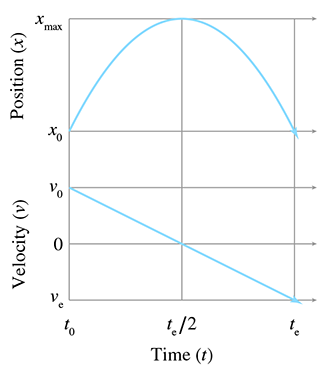
Figure 11.12Mouvement d’un projectile
La première observation est que le projectile atteint sa hauteur maximale, notée , quand l’accélération a consommé toute la vitesse et que . Il est facile de résoudre le temps auquel cela se produit en utilisant l’ Équation (11.13), :
Temps pour atteindre l’apogée
Nous sommes actuellement en une dimension et ne considérons que la hauteur. Mais si nous sommes en plus d’une dimension, seule la vitesse parallèle à l’accélération doit s’annuler. Il pourrait y avoir une vitesse horizontale, par exemple. Nous discutons du mouvement de projectile en plus d’une dimension dans un moment.
La deuxième observation est que le temps qu’il faut à l’objet pour descendre de son altitude maximale à son altitude initiale, noté dans la Figure 11.12, est le même que le temps nécessaire pour atteindre le maximum. En d’autres termes, le projectile atteint son apogée à .
La troisième et dernière observation est que la vitesse à , que nous avons notée , a la même magnitude que la vitesse initiale , mais de signe opposé.
Avant d’examiner le mouvement de projectile en plus d’une dimension, résumons les formules que nous avons dérivées dans cette section. Les deux premières sont les seules qui valent la peine d’être mémorisées ; les autres peuvent en être déduites.
Résumé des Équations Cinématiques pour l’Accélération Constante
L’extension des idées de la section précédente en 2D ou 3D est essentiellement une question de passage à la notation vectorielle ; , et deviennent respectivement , et .31 Bien sûr, le temps reste un scalaire :
Équations du mouvement sous accélération constante, en forme vectorielle
Notez que nous n’avons pas créé une version vectorielle de l’ Équation (11.17) ; nous y reviendrons dans un moment.
Ce changement de notation apparemment trivial cache en réalité deux faits assez profonds. Premièrement, au sens algébrique, la notation vectorielle n’est vraiment qu’un raccourci pour des ensembles d’équations scalaires parallèles pour , et . Le point important est que les trois coordonnées (cartésiennes) sont complètement indépendantes les unes des autres. Par exemple, nous pouvons faire des calculs concernant et ignorer complètement les autres dimensions, à condition que l’hypothèse d’accélération constante soit vérifiée pour le mouvement de l’objet. Sans l’indépendance des coordonnées, nous ne pourrions pas effectuer ce changement de notation. Le deuxième fait caché dans cette notation est que, lorsque nous considérons les vecteurs des équations ci-dessus comme des entités géométriques plutôt qu’algébriques, le système de coordonnées particulier utilisé pour décrire ces vecteurs est sans importance. Nous n’avons même pas besoin d’en spécifier un. Bien sûr, c’est un principe de base de la physique : la Nature ne connaît pas le système de coordonnées que vous utilisez.
Nous avons pu passer de 1D à 3D en mettant simplement quelques lettres en gras, grâce à l’indépendance des coordonnées. Cependant, il y a quelques remarques supplémentaires sur le mouvement de projectile en plusieurs dimensions, car il y a des situations où nous devons considérer les effets de toutes les coordonnées en même temps. Une situation a déjà été suggérée par l’absence d’une équation vectorielle correspondant à l’Équation (11.17). Autrement dit, comment pourrait-on résoudre pour le temps en connaissant le déplacement , l’accélération et la vitesse initiale ? En une dimension, le projectile est « confiné » et ne peut pratiquement pas éviter d’atteindre la cible impliquée par .32 Mais en deux dimensions ou plus, la situation est plus compliquée. L’augmentation de complexité liée à l’augmentation des dimensions est analogue au calcul de l’intersection de deux rayons (voir la Section A.8). En 2D, deux rayons quelconques doivent s’intersecter à moins d’être parallèles, tandis qu’en 3D, il existe la possibilité de rayons gauches, qui ne sont pas parallèles mais ne s’intersectent pas.
Par exemple, nous avons calculé plus tôt le temps qu’il faudrait à une bille lâchée d’une grande hauteur pour toucher le trottoir en dessous, ce qui est un problème unidimensionnel. Le problème tridimensionnel correspondant serait d’essayer de faire tomber la bille dans un seau qui peut se déplacer librement sur le trottoir. Disons que le seau est à notre gauche. Notre vitesse initiale devra alors avoir une composante vers la gauche, sinon la bille ne tombera pas dans le seau. Autre signe que le cas multidimensionnel est plus complexe que le 1D : une traduction directe de l’ Équation (11.17) en forme vectorielle donne des opérations insensées comme prendre la racine carrée d’un vecteur et diviser un vecteur par un autre.
La clé pour résoudre ce problème est de réaliser que les changements horizontaux (soit à la position du seau, soit à la vitesse initiale de la bille) n’affectent pas le temps qu’il faut à la bille pour atteindre le trottoir. C’est parce que les coordonnées sont indépendantes les unes des autres. La vitesse et l’accélération horizontales n’interagissent pas avec la vitesse et l’accélération verticales. Pour être précis, passons à notre système de coordonnées 3D standard, où pointe vers le haut et et sont dans le plan horizontal. Le temps qu’il faut à la bille pour atteindre l’altitude du seau dépend uniquement des équations concernant ; les coordonnées et peuvent être ignorées à cette fin. 33 En d’autres termes, calculer le moment où un projectile atteindra une cible est toujours un calcul unidimensionnel — il suffit de choisir quelle direction utiliser. Nous pouvons appliquer l’ Équation (11.17) pour résoudre un temps d’impact . Mais cette solution n’est qu’une proposition. Nous savons que si le projectile devait toucher la cible, il le ferait à ce moment. Pour vérifier que nous avons bien touché la cible, nous devons insérer ce temps d’impact présumé dans l’ Équation (11.19) pour voir où se trouvera le projectile à ce moment, et vérifier que la position du projectile est dans les tolérances appropriées.
Parlons un peu plus de ce que signifie exactement « choisir quelle direction utiliser », comme indiqué dans le paragraphe précédent. Dans des cas de mouvement de projectile simples, comme l’exemple de la bille, où la gravité est l’accélération constante, la direction à choisir est évidente : utiliser la direction de la gravité. De plus, parce que les systèmes de coordonnées sont choisis de sorte que le « haut » soit l’un des axes cardinaux, le processus de résolution d’un problème unidimensionnel dans cette direction est une affaire triviale consistant à extraire la coordonnée cartésienne appropriée et à ignorer les autres. En général, cependant, la situation peut être plus compliquée. Mais avant de discuter des détails du cas général, il y a encore quelques choses à dire sur cette situation particulière très importante et fréquente.
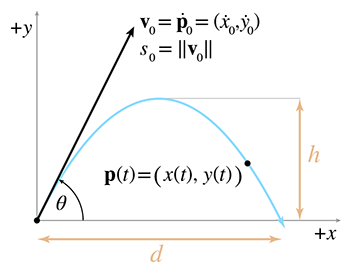
Figure 11.13Mouvement de projectile
Pour étudier le mouvement de projectile où l’accélération est uniquement due à la gravité, qui est une constante agissant le long d’un axe cardinal, établissons un espace de coordonnées 2D où est vers le haut et est l’axe horizontal. Sans perte de généralité, nous pouvons faire pivoter notre plan de sorte qu’il contienne la vitesse initiale, et donc toute la trajectoire de la particule. Nous choisissons dans la direction horizontale de la vitesse initiale. Nous simplifions aussi les choses en plaçant l’origine à la position initiale de l’objet. Cette notation (ainsi que quelques autres éléments dont nous aurons besoin dans un moment) est illustrée dans la Figure 11.13.
En examinant la notation de la Figure 11.13, nous voyons que nous pouvons exprimer la position de la particule en fonction du temps soit comme , soit en se référant à une coordonnée individuelle avec et . La vitesse instantanée (non représentée dans le diagramme) peut être notée en forme vectorielle comme ou en notation dérivée comme . Les composantes scalaires de la vitesse seront notées en notation dérivée comme et . La position et la vitesse initiales seront notées en ajoutant un indice 0 ( est la vitesse verticale initiale). Nous notons l’accélération due à la gravité comme ou .
Énonçons les équations de vitesse et de position en utilisant la notation qui vient d’être décrite :
Les distances étiquetées et dans la Figure 11.13 sont souvent d’intérêt ; il s’agit respectivement de la hauteur à l’apogée et de la distance horizontale parcourue. Comme discuté plus tôt dans un contexte unidimensionnel, la hauteur maximale est atteinte quand toute la vitesse initiale dans la direction montante a été consommée par la gravité, c’est-à-dire quand . Cela se produit au temps
Temps pour atteindre l’apogée
et à ce moment, la hauteur est égale à
Altitude à l’apogée
Nous avons dit plus tôt que le temps qu’il faut à l’objet pour redescendre à son altitude initiale (que nous avons noté ) était le double du temps nécessaire pour atteindre son apogée ; mais à ce moment, nous nous sommes simplement appuyés sur un diagramme. Cette fois, vérifions-le algébriquement :
Temps pour revenir à l’altitude initiale.
Comme prévu, le temps de vol est le double du temps nécessaire pour atteindre l’apogée. Calculons maintenant , la distance horizontale parcourue :
Distance horizontale parcourue
Bien sûr, et sont basés sur l’hypothèse que nous voulons savoir quand le projectile revient à son altitude initiale. C’est important pour le lancement d’un projectile depuis un plan de sol plat. Si le projectile n’est pas lancé depuis le sol, ou si le sol n’est pas plat, nous devrons considérer où la parabole intersecte le plan du sol.
Nous souhaitons souvent spécifier la vitesse initiale en termes d’angle et de vitesse, plutôt qu’en termes de vitesses le long de chaque axe. Autrement dit, nous souhaitons utiliser des coordonnées polaires plutôt que cartésiennes. Comme indiqué dans la Figure 11.13, nous notons la vitesse de lancement initiale comme (qui est égale à la magnitude de ) et l’angle de lancement comme . En convertissant la vitesse initiale des coordonnées cartésiennes aux coordonnées polaires (voir la Section 7.1.3 si vous ne vous souvenez plus comment), nous obtenons
En insérant cela dans nos équations cinématiques (11.20) et (11.21), nous obtenons les équations du mouvement pour un projectile en termes d’angle et de vitesse de lancement :
Nous pouvons aussi exprimer , et en termes de et :
Grandeurs importantes dans le mouvement de projectile, exprimées en termes d’angle et de vitesse de lancement
Ces équations sont très pratiques car elles capturent directement la relation entre les grandeurs « conviviales » que sont la vitesse de lancement, l’angle de lancement, le temps de vol et la distance de vol.
À ce stade, faisons une observation intéressante sur la relation entre la vitesse initiale et la distance horizontale parcourue . C’est une relation quadratique, ce qui signifie que lorsque nous augmentons d’un facteur , nous augmentons d’un facteur . Il pourrait sembler plus naturel que la relation soit linéaire, ce qui signifierait que augmenterait du même facteur . Nous pouvons comprendre la relation quadratique en décomposant la vitesse initiale en ses composantes horizontale et verticale, notées précédemment et respectivement. Il n’est pas difficile de voir qu’augmenter augmentera du même facteur. Moins évident est le fait que la même chose est vraie pour . C’est vrai parce que la durée pendant laquelle l’objet est en l’air est proportionnelle à . Donc si nous augmentons la vitesse verticale, nous donnons à l’objet plus de temps pour voyager. Ainsi, tout facteur d’échelle que nous appliquons à affectera la distance deux fois : une fois en raison de l’augmentation de la vitesse horizontale due à , et une autre fois en raison de l’augmentation du temps de vol due à . Cela produit une relation quadratique entre et .
Revenons maintenant à une question que nous avions mise de côté plus tôt : comment déterminer le point d’impact pour des vecteurs arbitraires , et ? Nous avons dit que la clé était de « choisir une direction » et de résoudre un problème unidimensionnel dans cette direction. Si une direction cardinale est choisie, nous jetons simplement les autres coordonnées. Pour une direction arbitraire, nous projetons le problème sur une droite dans cette direction. Toute composante de déplacement, de vitesse ou d’accélération perpendiculaire à cette droite est écartée lors de la projection. Nous avons appris comment projeter sur une droite et mesurer le déplacement dans une direction particulière en utilisant le produit scalaire dans la Section 2.11. Il ne reste qu’à choisir une direction.
En supposant que le projectile atteint la cible, nous obtiendrons la même valeur pour quelle que soit la direction choisie. Mais cela ne signifie pas que le choix est sans importance. Par exemple, dans l’exemple de la bille, il serait catastrophique de choisir les directions ou , car il n’y a pas d’accélération dans l’une ou l’autre de ces directions et l’application de l’ Équation (11.17) entraînerait une division par zéro. Cela suggère la stratégie consistant à utiliser simplement lui-même comme direction de projection. Pour ce faire, nous calculons le produit scalaire de chaque quantité vectorielle avec , en effectuant les substitutions , , et . Ces quantités scalaires peuvent ensuite être insérées dans l’ Équation (11.17). L’Exercice 10 explore cela plus en détail.
11.7L’intégrale
Nous venons de montrer que le déplacement total d’un objet dans un intervalle de temps est égal à l’aire sous le graphe de la vitesse de l’objet. Nous avons utilisé l’exemple de l’accélération constante, qui a un graphe simple, et l’aire était facile à calculer géométriquement. Nous n’avons pas poursuivi dans une plus grande généralité l’argument de limite qui nous a conduits à la surprenante équivalence, car ce cas particulier a de si remarquables applications. Nous sommes maintenant prêts à discuter de cas plus généraux. Le besoin de calculer une « sommation continue », où le taux de croissance est une fonction connue, est un concept courant en ingénierie et en sciences. L’outil du calcul utilisé pour calculer ces sommes est l’intégrale.
Si vous avez déjà étudié le calcul intégral et avez une bonne intuition de l’utilité de l’intégrale, vous pouvez passer directement à la Section 11.8, quand notre attention retourne au sujet de la mécanique. Cependant, si vous n’avez jamais fait de calcul intégral ou si votre intuition sur l’intégrale est un peu fragile, continuez à lire.
Il y a deux façons importantes d’aborder l’intégrale. La première consiste essentiellement à rendre la notion de « sommer beaucoup de petits éléments » un peu plus précise et à introduire une certaine formalisation mathématique. L’autre façon consiste à comparer l’intégrale à la dérivée. Il est important de comprendre les deux interprétations. L’intégrale est un peu plus difficile à appréhender que la dérivée, mais pour des raisons qui deviendront apparentes plus tard, elle joue un rôle beaucoup plus important dans les simulations physiques et de nombreuses autres domaines de la programmation de jeux vidéo. Comprendre ce que fait l’intégrale est très important, même si le vaste assortiment de techniques analytiques sur papier pour calculer des intégrales n’est pas très utile dans notre cas, étant remplacé par des techniques d’intégration numérique.
Transformons notre sommation informelle en notation mathématique, dans laquelle nous calculons l’aire sous la courbe dans l’intervalle . Nous partitionnons cet intervalle en tranches, chacune ayant la largeur . Le -ième rectangle aura une coordonnée gauche , une hauteur égale à , et une aire de . En utilisant la notation de sommation, nous additionnons tous ces rectangles :
L’erreur de cette approximation diminue à mesure que nous augmentons le nombre de tranches , et désormais, à moins que vous ne soyez un nouveau venu, vous savez que nous devons prendre la limite encore une fois.34 En prenant la limite quand augmente sans borne et que les tranches deviennent infinitésimalement petites, nous obtenons notre définition de l’intégrale définie.
Intégrale Définie
Dans cette équation,
L’Équation (11.22) se lit « L’intégrale de à de . » Certains lisent comme « par rapport à . » La grande similitude dans la notation entre les membres gauche et droit de l’ Équation (11.22) est intentionnelle. Tout comme pour la dérivée, le pas fini devient l’infinitésimal . Le symbole sigma utilisé pour les sommations discrètes est remplacé par le symbole , un S allongé que Leibniz voulait faire signifier « sommation ».35 Les et sont connus comme les « bornes d’intégration » et définissent les points de départ et d’arrivée. La fonction étant intégrée est appelée l’intégrande.
Une intégrale définie comme somme de « tranches verticales » de cette façon est connue sous le nom d’intégrale de Riemann. C’est la définition la plus courante, mais pas la plus générale. En fait, notre définition n’est pas tout à fait aussi générale que la définition typique d’une intégrale de Riemann. Le lecteur attentif peut remarquer que est une constante et pourrait être sorti devant la sommation, la rendant . Cela fonctionne dans ce cas parce que nous utilisons une partition régulière, et toutes les tranches ont la même largeur. En général, cependant, cette restriction n’est pas nécessaire. La définition traditionnelle de l’intégrale de Riemann prend la limite quand la largeur de la plus grande tranche tend vers zéro. Notre définition est certainement assez puissante pour les fonctions bien comportées avec lesquelles nous travaillons, mais des définitions plus puissantes sont nécessaires pour intégrer des fonctions plus ésotériques. De plus, vous pourriez vous demander pourquoi nous calculons l’aire du rectangle en utilisant la valeur de la fonction au côté gauche du rectangle, plutôt que, par exemple, le point central. Ce serait certainement plus précis. À des fins théoriques de définition de l’intégrale de Riemann, ces choix deviennent identiques dans la limite et nous sommes donc libres de faire le choix que nous voulons. Cependant, lors de l’approximation numérique d’intégrales, il est utile de considérer de telles options.
11.7.1Exemples d’intégrales
À ce stade, nous avons introduit suffisamment de notation et de terminologie pour examiner quelques exemples d’intégrales. Nous aimerions le faire avant d’aller plus loin dans les détails mathématiques. De nombreuses applications de l’intégrale en programmation de jeux vidéo (et dans de nombreuses autres disciplines d’ingénierie) se conçoivent plus directement non pas comme une aire sous une courbe, mais comme un « total cumulatif ». Pensez à un compteur électrique. À tout moment donné, le compteur augmente à un taux déterminé par la quantité d’électricité consommée à cet instant. Le compteur est un total cumulatif continu, et nous disons qu’il intègre le taux de consommation. Quand la climatisation se met en marche, le taux de consommation augmente et le compteur avance plus vite ; la nuit, quand toutes les lumières sont éteintes et les fenêtres ouvertes parce qu’il fait beau dehors, la consommation est la plus faible et le compteur tourne lentement. Le taux de consommation est une fonction qui varie avec le temps et est la fonction étant intégrée. Une intégrale définie de cette fonction entre deux valeurs temporelles et nous donnerait la quantité totale d’énergie consommée pendant cet intervalle de temps :
Calcul de la consommation d’électricité
Bien que ce ne soit pas essentiel à notre discussion ici, mentionnons quels sont les termes et unités physiques appropriés. Retournant à notre analyse dimensionnelle de la Section 11.2, l’énergie est une grandeur dérivée ; c’est le produit d’une force et d’une longueur. Le Chapitre 12 montre que la force est elle-même une grandeur dérivée qui a les unités et est mesurée dans le système SI en Newtons (N). Ainsi, l’énergie a des unités abstraites , une combinaison d’unités fondamentales qui laisse vraiment perplexe. Dans le système SI, l’énergie est mesurée en Joules (J), et . Le terme physique approprié pour « taux de transfert d’énergie par unité de temps » est la puissance, et l’unité SI de puissance est le watt (W), qui est égal à un joule par seconde.
En notant la consommation totale d’énergie comme et le taux de consommation instantanée comme , nous pouvons réécrire l’ Équation (11.23) comme
Calcul de la consommation d’électricité, cette fois avec une notation plus digne
Bien que les détails sur la quantification de l’énergie ne soient pas essentiels à notre discussion, il y a une observation très importante à faire : l’ Équation (11.24) est dimensionnellement cohérente. À gauche, la grandeur mesurée est l’énergie, qui dans le système SI est mesurée en joules. Mais à droite, le taux de consommation est mesuré en watts. Comment est-ce possible ? Rappelons que l’intégrale représente une sommation, et les éléments infinitésimaux étant sommés sont le produit de l’intégrande (dans ce cas, ) et d’un infinitésimal du domaine d’intégration (dans ce cas, ). En termes d’intégrale de Riemann, le premier détermine la hauteur de chaque tranche, et le second détermine sa largeur. Ici, représente un pas de temps infinitésimalement petit, mesuré en secondes, donc les unités à droite sont Ainsi, les membres gauche et droit de l’ Équation (11.24) sont mesurés en joules.
Nous pouvons étendre cet exemple en calculant la facture d’électricité, plutôt que simplement la consommation totale. Bien sûr, si le prix de l’énergie est fixe, nous multiplions simplement la consommation par le prix. Mais que faire si le prix variait de moment en moment ? (Cela ne devrait pas être difficile à imaginer de nos jours.) Dans ce cas, nous intégrerions le coût plutôt que l’énergie. Nous déterminons comment calculer le coût d’un seul intervalle de durée (une tranche « différentielle » de temps) et nous sommons ensuite sur tous les intervalles :
Calcul du coût de l’électricité
Passons à un autre exemple d’intégrale. Imaginez un homme utilisant une machine à coudre avec une pédale qui a une réponse à vitesse variable. S’il appuie légèrement sur la pédale, la machine à coudre fait avancer le tissu lentement, et s’il « appuie à fond », la machine à coudre avance à sa vitesse maximale. Maintenant, imaginez sa fille assise sous la table qui regarde son père coudre. Elle ne peut voir que la pédale, mais pas la machine à coudre ni le tissu. Les seules informations disponibles pour la fille sont l’enfoncement de la pédale, et nous supposons que, sur la base de sa connaissance des machines à coudre et des pédales, elle peut inférer une fonction qui décrit la vitesse à laquelle le tissu avance au temps . La fille observe la pédale pendant une minute environ, puis son père s’arrête et lui demande : « Quelle longueur de tissu ai-je cousue ? » Disons que cette fille est particulièrement brillante et connaît le calcul intégral, donc elle intègre la fonction pour obtenir la longueur totale de tissu qui est passée sous l’aiguille. Comme nous le verrons plus tard, ce type de question est en fait très proche des types de problèmes de mécanique résolus avec des intégrales dans les jeux vidéo !
Une dernière analogie utile : pensez à une dérivée comme à un compteur de vitesse qui vous indique un taux de variation instantané, et à l’intégrale comme à un odomètre décrivant la sommation continue de ce taux de variation. Notez que la lecture du compteur de vitesse ne dépend pas de ce voyage en voiture de l’été dernier, ni même de ce qui s’est passé il y a deux secondes. La lecture du compteur de vitesse n’est affectée que par ce qui se passe à cet instant. L’odomètre, en revanche, est un cumul en cours d’exécution, et toute l’histoire depuis que la voiture a quitté la concession est incluse dans sa lecture. Notre fille sous la table de couture doit faire attention à la pédale tout le temps si elle veut faire une estimation précise de la longueur totale de tissu consommée à tout moment donné.
De nombreux types de problèmes d’ingénierie résolus avec des intégrales sont formulés en termes de sommations continues comme celles-ci : Quel est le déplacement total, quand je connais la fonction de vitesse ? Quelle est la quantité totale d’eau dans la baignoire, étant donné l’historique de l’angle de déviation du robinet ? Quelle est la quantité restante de carburant, en fonction du taux de consommation comme fonction du temps ? Pour formuler l’intégrale pour des problèmes comme ceux-ci, nous pouvons d’abord imaginer d’approximer la valeur que nous souhaitons calculer en utilisant une somme finie () et un pas de taille finie (). Nous utilisons ensuite un argument de limite pour remplacer la par un , et le par un (voir l’ Équation (11.22)). C’est l’essence de ce que l’on entend par « sommation continue ».
Bien sûr, nous pouvons utiliser l’intégrale pour calculer l’aire sous une courbe, comme les manuels de calcul aiment tant à le souligner. Quand nous faisons glisser une ligne de gauche à droite, la fonction intégrée détermine le taux auquel nous accumulons de l’aire. Là où la fonction a une grande valeur, notre aire totale s’accumule plus rapidement, car les « tranches » dans cette zone sont hautes. Cependant, du point de vue d’un programmeur de jeux vidéo, les manuels de calcul semblent se concentrer sur cette application particulière de l’intégrale de manière disproportionnée par rapport à son application aux problèmes du monde réel.
11.7.2La relation entre la dérivée et l’intégrale
Voyons comment calculer des intégrales maintenant que l’utilité d’une intégrale est (nous l’espérons) solidement ancrée dans votre esprit. En regardant la définition de l’ Équation (11.22), on se demande comment diable on peut évaluer cette limite. Pour la dérivée, nous avions pu manipuler l’expression prise à la limite de sorte que nous pouvions simplement substituer , mais cela ne semble pas possible dans l’ Équation (11.22). Il s’avère que l’ Équation (11.22) est surtout utile comme moyen de reconnaître quand le problème que vous avez est une intégrale, et est utile pour transformer correctement ce problème en notation intégrale. Elle est aussi utilisée quand nous approximons des intégrales numériquement, où au lieu de ramener la largeur des tranches à zéro, nous nous arrêtons à un petit mais fini. Mais cette définition n’est pas utilisée pour résoudre des intégrales à la main.
Explorons l’ Équation (11.15), l’intégrale que nous avons pu résoudre par un simple argument géométrique. Puisque c’est une fonction qui décrit la position en fonction du temps, nous devrions pouvoir prendre sa dérivée et obtenir une fonction décrivant la fonction de vitesse , puis reprendre la dérivée pour obtenir la fonction d’accélération . Vérifions que c’est bien le cas :
C’est conforme aux attentes. Pas de surprises ici, mais il est rassurant de confirmer que les mathématiques et la physique fonctionnent réellement. Nous savions que la dérivée de la fonction de position est la fonction de vitesse. La question est : pourquoi n’avons-nous pas utilisé cette connaissance plus tôt ? Rappelons que nous connaissions et essayions de déterminer ce qu’était . Nous avons pu obtenir la réponse par un argument graphique, mais il semble qu’il pourrait y avoir une autre voie. Au lieu de chercher une fonction pour calculer l’aire sous la courbe, nous aurions pu chercher une fonction de position dont la dérivée était la fonction de vitesse que nous connaissions déjà. Une telle fonction est connue sous le nom d’antidérivée.
Explorons un peu plus cette idée d’« intégration comme antidérivée ». Pour ce faire, nous n’avons essentiellement qu’à appliquer les règles de différenciation, y compris le petit sous-ensemble que nous avons appris dans la Section 11.4.5, à l’envers.36 Supposons que nous commencions avec la fonction de vitesse , et que nous cherchions un dont la dérivée est . Faites semblant pour l’instant de ne pas connaître déjà la réponse. Pour trouver , nous décomposons en ses termes (en utilisant la règle de la somme à l’envers), puis nous prenons l’antidérivée de chaque terme (en utilisant la règle de la puissance à l’envers). Rappelons que la règle de la puissance de différenciation dit essentiellement : « Multiplier par l’exposant, puis diminuer l’exposant de un. » Donc la règle de la puissance pour l’antidifférenciation est : « Augmenter l’exposant de un, puis diviser par le nouvel exposant. » En appliquant ces deux règles à , nous écrivons
Mais comparez ce résultat à l’ Équation (11.25) ; vous remarquerez qu’il manque un terme . Que s’est-il passé ? Il y a une certaine « perte d’information » qui se produit quand nous prenons la dérivée. Si nous savons à quelle vitesse nous allions, nous pouvons toujours déterminer combien de distance nous avons parcouru. Cependant, nous ne pouvons pas savoir où nous avons fini à moins de savoir où nous avons commencé. Ce terme supplémentaire est le « point de départ » que la dérivée élimine, parce que toute valeur constante a une dérivée nulle. Pour cette raison, il n’est pas tout à fait exact de parler de « l’ » antidérivée de , puisqu’il n’y a pas de fonction unique dont la dérivée est , mais une infinité. Toutes les différentes antidérivées sont en réalité des copies les unes des autres, décalées verticalement sur le graphe selon leur valeur particulière de .
Nous avons dit de manière générale qu’il existe une relation entre l’intégrale (définie) et l’antidérivée. Nous savons donc que dans un certain sens, les opérations d’intégration et de différenciation sont des opérations inverses. Le théorème du calcul qui résume ces relations avec précision porte un nom important : le théorème fondamental du calcul. Le théorème est composé de deux parties. (Les sources ne les énumèrent pas toujours dans le même ordre.)
La première partie montre comment une intégrale définie peut être calculée en utilisant une antidérivée.
Théorème Fondamental du Calcul, Partie 1
Soit . (Autrement dit, est une antidérivée quelconque de .) Alors l’intégrale définie peut être calculée comme
L’Équation (11.26) peut sembler un peu mystérieuse en termes abstraits, mais quand nous remplaçons le et génériques par des notations spécifiques à la position et à la vitesse, la première partie du théorème fondamental du calcul semble énoncer l’évidence :
Cela dit que l’effet cumulatif de la vitesse de l’instant à l’instant (le déplacement net pendant cet intervalle), est égal à la différence entre la position au temps et la position au temps .
Remarquez que toute antidérivée fonctionnera — peu importe laquelle. C’est parce que le décalage constant dans s’annule lors de la soustraction . Pour le voir, considérons la métaphore du compteur électrique. Vous pouvez penser à la lecture numérique brute sur le compteur comme à une antidérivée de votre taux de consommation. Les lectures sur le cadran au début et à la fin du mois correspondent respectivement à et . Notez que la valeur numérique brute de la lecture est en grande partie sans intérêt. Elle pourrait contenir des données influencées par quelqu’un qui vivait dans la maison avant vous. La différence entre les deux lectures, cependant, est très pertinente. Elle correspond à l’intégrale définie, et déterminera le montant de votre facture d’électricité pour le mois.
Ou considérons l’odomètre d’une voiture. Disons que vous vouliez mesurer la longueur d’un trajet particulier. Pour ce faire, au début du trajet vous appuieriez sur le bouton de remise à zéro du compteur de trajet dédié que toutes les voitures ont depuis environ 1980, et à la fin du trajet vous liriez simplement la valeur du compteur de trajet. Puis vous vous réjouiriez de n’avoir pas eu à faire le moindre effort mental ni à utiliser un seul principe du calcul. Mais que faire si le compteur de trajet était cassé et que tout ce dont vous disposiez était le compteur total ? Celui-ci ne peut pas être facilement remis à zéro.37 Dans ce cas, armé des connaissances du calcul que vous avez acquises dans ce livre (ou peut-être juste du bon sens que vous auriez pu acquérir n’importe où), vous soustrairiez la lecture du compteur kilométrique à la fin du trajet de la lecture au début du trajet pour obtenir la distance du trajet. Les lectures réelles du compteur sont et , les valeurs de l’antidérivée. Tout comme avec le compteur électrique, les valeurs brutes ne sont pas utiles38 — seule leur différence compte.
La première partie du théorème fondamental du calcul est très importante car c’est ainsi que nous calculons réellement les intégrales, du moins à la main. Rappelons que nous avons défini l’intégrale définie comme une somme d’un grand nombre de tranches dans la limite quand le nombre de tranches tend vers l’infini et les tranches deviennent infinitésimalement minces. Cette définition ne se prête pas à des manipulations algébriques, comme l’était la définition de la dérivée. La première partie du théorème fondamental du calcul dit que bien que nous puissions formuler des problèmes en utilisant la définition de l’intégrale, nous calculons des intégrales définies en trouvant une antidérivée de la fonction intégrée (à la main, du moins).
La deuxième partie du théorème fondamental du calcul est l’envers de la première partie. La première partie disait que les intégrales définies peuvent être calculées en utilisant des antidérivées ; la deuxième partie montre comment définir une antidérivée en termes d’une intégrale définie.
Théorème Fondamental du Calcul, Partie 2
Soit définie par
Alors la dérivée de est donnée par
Il peut falloir un certain effort pour déchiffrer cette élégance concise, aussi reformulons-la en français courant. Nous commençons avec une fonction donnée . Nous formons ensuite une nouvelle fonction , dont la valeur est déterminée en prenant l’intégrale définie de depuis un point de départ arbitraire , et un point d’arrivée . Notez que l’argument de est utilisé pour définir quand arrêter l’intégration de . La variable est une variable muette de notation pour l’intégration ; elle n’est pas vue en dehors de l’intégrale. La deuxième partie du théorème fondamental du calcul dit que si nous prenons la dérivée de cette nouvelle fonction , le résultat est notre fonction originale . En ce sens, l’intégration et la différenciation sont des opérations inverses.
Il peut être difficile de saisir la raison pour laquelle se retrouve dans ce qui peut sembler un emplacement étrange, définissant la borne supérieure de l’intégration, mais c’est le point essentiel. Le second théorème dit qu’une fonction définie comme une intégrale telle que l’ Équation (11.27) croîtra à un taux déterminé par l’intégrande. Si nous ajustons légèrement la borne supérieure de l’intégration, le changement dans le résultat de la somme globale sera proportionnel à la valeur de l’intégrande. En pensant à une intégrale comme calcul d’une aire, la borne supérieure de l’intégration, , détermine la frontière droite. Si nous repoussons cette frontière un peu vers la droite, l’augmentation de la quantité d’aire dépendra de la hauteur de la fonction en .
Réécrivons le théorème en utilisant une notation particulière aux déplacements et aux vitesses :
Nous voyons maintenant que, pour définir le déplacement en termes de , il n’y a vraiment qu’un seul endroit logique où placer . La vitesse avant est pertinente pour le déplacement qui s’est produit au temps , et l’histoire après n’est pas pertinente. Nous utilisons pour définir le point d’arrêt de l’intervalle de temps des vitesses à intégrer.
D’où vient ? C’est un point de départ arbitraire, reflétant un degré d’incertitude (ou de liberté) très similaire à la position de départ inconnue (ou non pertinente) . Nous pouvons choisir comme bon nous semble, par rapport à ce que nous voulons que nos mesures soient relatives. La valeur de définit le point où . Il est probablement plus précis de dire que décrit notre position relative. Relative à quoi ? À l’endroit où nous étions au temps .
Nous sommes maintenant prêts à clarifier la relation parfois confuse entre l’intégrale définie et l’intégrale indéfinie. L’adjectif « définie » dans « intégrale définie » vient du fait que nous avons spécifié les bornes d’intégration. De ce fait, la « réponse » à une intégrale définie peut être un seul nombre. Quand nous évaluons une intégrale définie, telle que
le est « intégré » et n’apparaît pas dans le résultat. La signification de ce qui précède est « la sommation continue de la vitesse pendant l’intervalle de temps à . » Il n’aurait pas de sens que le résultat contienne — de quel parlerait-on ? Ainsi, si toutes les autres variables de sont connues, et que les bornes et sont connues, nous pouvons réduire la réponse à un simple nombre. Si, cependant, contient d’autres quantités inconnues (peut-être une densité variable ), ou si les bornes d’intégration elles-mêmes sont des paramètres, alors le résultat sera une fonction en termes de ces variables. Dans tous les cas, dans une intégrale définie, le ne fera pas partie du résultat. Si vous êtes programmeur, vous pouvez penser au comme à une « variable locale » de l’intégrale définie.
Une intégrale indéfinie, en revanche, étant une antidérivée, aura une « réponse » qui est une fonction, pas un seul nombre. Elle est notée simplement en supprimant les bornes d’intégration, comme dans
Encore une fois, soulignons que bien que cela puisse sembler très similaire à la notation utilisée pour désigner une intégrale définie, sa signification est en réalité assez différente. Le résultat de l’évaluation de cette intégrale ne devrait pas être un nombre, mais une antidérivée de ; c’est-à-dire que nous devrions obtenir une fonction de . De plus, un résultat correct aura une constante arbitraire ajoutée, connue sous le nom de constante d’intégration, qui nous rappelle qu’il existe toute une famille de fonctions dont la dérivée est . Ainsi, la signification de l’intégrale indéfinie ci-dessus est « une fonction qui exprime la sommation continue de la vitesse en fonction du temps, depuis un point de départ inconnu ». Nous avons noté ce décalage constant comme , mais dans un cadre plus général, il est généralement écrit avec un majuscule. Par exemple,
Constante d’intégration
Nous n’avons pas besoin d’écrire les bornes d’intégration dans une intégrale indéfinie car elles sont implicites. Comme nous l’avons vu dans la deuxième partie du théorème fondamental du calcul, l’interprétation d’une antidérivée en termes d’intégrale définie est d’utiliser l’argument de l’antidérivée comme borne supérieure de l’intervalle d’intégration. En d’autres termes, une intégrale indéfinie est simplement une intégrale définie avec des bornes d’intégration implicites de la forme dans l’ Équation (11.27). Le degré de liberté dans l’ Équation (11.27) connectant l’ensemble des antidérivées possibles était capturé par la borne inférieure d’intégration inconnue (). Dans une intégrale indéfinie, nous n’écrivons pas les bornes d’intégration, et à la place l’incertitude est contenue dans la constante d’intégration ( ou ). Nous pouvons résumer cela (en utilisant les deux schémas de nommage) par
L’intégrale indéfinie
11.7.3Résumé du calcul infinitésimal
Nous avons achevé notre présentation principale du calcul infinitésimal dans ce livre, à l’exception de quelques petits éléments qui apparaîtront dans des sections ultérieures. Notre objectif était d’amener un lecteur sans aucune connaissance du calcul à comprendre la vue d’ensemble de l’utilité des dérivées et des intégrales. Nous avons survolé à grande vitesse les nombreux détails et techniques qui surgissent dans les situations pratiques — ces détails remplissent des milliers de pages dans les manuels de calcul.
Résumons les points importants que vous devez connaître sur le calcul infinitésimal pour utiliser pleinement le reste de ce livre.
L’objectif fondamental d’une dérivée est de mesurer un taux de variation.
La dérivée est définie par un argument de limite. On forme une approximation du résultat, puis on observe ce qui se passe lorsqu’on prend des approximations de plus en plus précises, à la limite où notre erreur tend vers zéro.
Nous avons présenté seulement quelques règles de différentiation analytiques. La différentiation est un opérateur linéaire, ce qui nous permet de différentier des sommes. La règle de la puissance nous dit comment évaluer des expressions de la forme . Ensemble, ces règles nous permettent de calculer les dérivées de polynômes. Nous avons également présenté les dérivées des fonctions sinus, cosinus et exponentielle. La règle de la chaîne nous dit comment différentier une fonction de la forme .
Une intégrale est une « sommation continue », ou « total cumulé ». Ces sommes sont également équivalentes à l’aire sous la courbe de la fonction sommée.
Une intégrale de Riemann définit une intégrale par un argument de limite. On prend la somme d’un grand nombre de petits éléments, ce qui en général est une approximation de la somme vraie lorsque le nombre d’éléments est fini. La somme vraie est obtenue en considérant ce qui se passe lorsqu’on augmente le nombre d’éléments à l’infini, faisant disparaître l’erreur dans notre approximation.
Les intégrales de Riemann ne sont généralement pas directement solubles de la même façon que les dérivées. Elles servent à reconnaître lorsque le problème que l’on résout est une intégrale, et à aider à la mettre en place correctement. C’est également ainsi qu’on les résout numériquement (nous n’avons pas encore abordé les détails de la procédure).
Le théorème fondamental du calcul stipule que l’intégration et la différentiation sont des opérations inverses. Sur le papier, les intégrales définies sont calculées en cherchant une antidérivée, et non en évaluant l’intégrale de Riemann à la limite. Une fonction dont l’argument définit la borne supérieure d’intégration sera une antidérivée de l’intégrande.
Une intégrale indéfinie est une fonction qui est une antidérivée de l’intégrande. Une intégrale définie produit un nombre représentant la sommation continue de l’intégrande sur l’intervalle identifié par les bornes d’intégration. Une intégrale définie peut être calculée en évaluant toute antidérivée aux points de départ et d’arrivée, et en prenant la différence entre ces deux valeurs (en soustrayant la valeur au début de l’intervalle de la valeur à la fin de l’intervalle). Une intégrale indéfinie est en réalité une intégrale définie dont les bornes d’intégration sont implicites.
11.8Mouvement circulaire uniforme
Assez de calcul — revenons à la physique. Cette section étudie le mouvement d’une particule se déplaçant en cercle à vitesse constante. Nous étudions le mouvement d’une particule car de nombreux calculs physiques peuvent être simplifiés en représentant un corps rigide comme une masse ponctuelle en son soi-disant centre de masse. Puisqu’un trajet circulaire est intrinsèquement limité à un plan, la Section 11.8.1 commence notre étude en deux dimensions. Après avoir établi les relations fondamentales, la Section 11.8.2 montre comment les appliquer dans un monde où le plan orbital est orienté arbitrairement en trois dimensions.
11.8.1Mouvement circulaire uniforme dans le plan
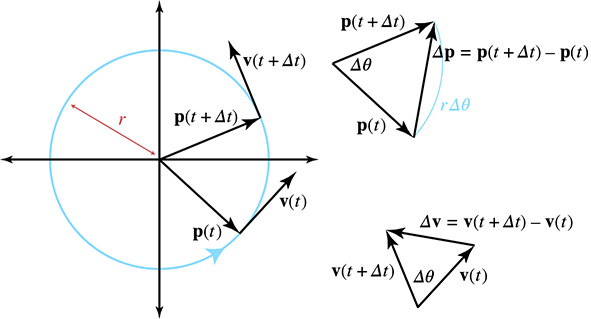
Figure 11.14Mouvement circulaire uniforme
Une particule se déplaçant en cercle à vitesse constante n’a pas une vélocité constante ; si c’était le cas, elle se déplacerait en ligne droite. Puisque la vélocité de l’objet varie dans le temps, il doit être soumis à une certaine accélération. Voyons si nous pouvons déterminer laquelle. Considérons un objet se déplaçant à vitesse constante sur un trajet circulaire de rayon . Pour faciliter nos calculs, et sans perte de généralité, nous établissons un référentiel bidimensionnel qui se trouve dans le plan de mouvement et dont l’origine est au centre du cercle. Rappelons que la vélocité instantanée d’une particule est toujours tangente à sa trajectoire, donc le vecteur vélocité en tout point donné sera toujours tangent au cercle en ce point. De plus, d’après la définition de la vitesse, nous savons que .
Sur le côté gauche de la Figure 11.14, on voit une particule en mouvement circulaire uniforme pendant un pas de temps fini . La figure examine l’état de la particule au temps et également à un temps ultérieur .
Considérons la vélocité et l’accélération instantanées, en commençant par une approche géométrique. Examinons les triangles sur le côté droit de la Figure 11.14. Le triangle du haut montre la variation de position sur un certain intervalle de temps , résultant de la variation angulaire . C’est un triangle isocèle dont les côtés ont pour longueur , le rayon du cercle, et dont la base est , qui est la variation nette de position pendant l’intervalle. Le triangle du bas représente la variation de vélocité sur ce même intervalle, et c’est également un triangle isocèle. Les côtés du triangle du bas ont pour longueur , puisque nous supposons que la vélocité a une magnitude constante, et la base est . Les deux triangles sont semblables, car tous deux sont isocèles avec l’angle au sommet , donc on peut écrire
En général, la longueur de mesure un « raccourci » à travers le cercle, plutôt que la distance réellement parcourue le long du périmètre du cercle, qui est . Mais considérons ce qui se passe lorsque et deviennent très petits, comme le montre la Figure 11.15.
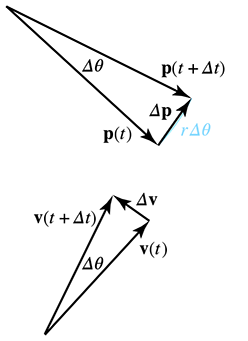
Figure 11.15Une petite rotation.
Remarquons que lorsque devient de plus en plus petit, la longueur de s’approche de la distance réelle, et à la limite, les deux distances sont égales :
En substituant ce résultat dans notre relation issue des triangles semblables, nous obtenons
Le membre gauche de l’Équation (11.28) est une variation de vélocité sur un intervalle lorsque la longueur de l’intervalle tend vers zéro. C’est la définition de l’accélération instantanée ! Ainsi, la magnitude de l’accélération est .
Bien sûr, l’accélération est une grandeur vectorielle, et tout ce que nous avons déterminé jusqu’ici est sa magnitude (constante). Quelle est sa direction ? Pour le voir, comparons les vecteurs et dans la Figure 11.15. Remarquons qu’ils pointent dans des directions opposées. En fait, à la limite lorsque tend vers zéro, ils pointent dans des directions exactement opposées. C’est-à-dire que l’accélération est toujours dirigée vers le centre du cercle, c’est pourquoi elle est appelée accélération centripète (« qui cherche le centre »).
Vélocité et accélération du mouvement circulaire uniforme
Lorsqu’un objet se déplace à vitesse constante sur un trajet circulaire de rayon , la vélocité est tangente au cercle. L’accélération à tout instant est dirigée vers le centre du cercle et a pour magnitude
En combinant quelques éléments de géométrie élémentaire avec quelques idées du calcul, nous avons obtenu les faits les plus importants sur le mouvement circulaire uniforme. Une combinaison légèrement différente de géométrie et de calcul permettra d’obtenir les équations cinématiques réelles. À cette fin, il sera utile de se référer à , l’angle que fait le vecteur avec l’axe en utilisant les conventions mathématiques traditionnelles, comme le montre la Figure 11.16.
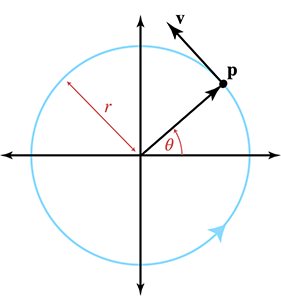
Figure 11.16 La position de la particule peut être identifiée par l’angle
Précédemment, nous nous préoccupions de , la variation de cet angle, mais nous considérons maintenant sa valeur en tant que fonction du temps. Nous notons l’angle initial comme . Nous définissons également la fréquence angulaire comme , qui
est mesurée en radians par seconde.39 Ainsi, nous pouvons exprimer l’angle à tout instant comme
Angle en fonction du temps
Nous avons déjà vu l’équation paramétrique d’un cercle dans la Section 9.1, nous savons donc comment exprimer les équations cinématiques de la position de la particule en termes du rayon et de l’angle , comme
Position en fonction du temps
Puisque la fonction vélocité est la dérivée de la fonction position, nous pouvons différentier ces équations pour obtenir les équations de vélocité. Heureusement, nous avons appris les dérivées des fonctions sinus et cosinus dans la Section 11.4.6 et la règle de la chaîne dans la Section 11.4.7. La différentiation nous donne
Vélocité en fonction du temps
En différentiant encore une fois pour obtenir l’accélération, nous avons
Accélération en fonction du temps
Ces résultats concordent avec nos conclusions précédentes. En comparant les fonctions d’accélération à la position, nous confirmons qu’elles pointent bien dans des directions opposées. De plus, en se rappelant que , nous notons que, comme prévu, l’accélération a pour magnitude .
Parfois, est plus directement accessible que . Dans ces situations, il est utile de pouvoir exprimer la magnitude de l’accélération centripète uniquement en termes de et . En résolvant pour , on obtient . En substituant cela dans l’Équation (11.29), nous obtenons
Accélération en termes de vitesse angulaire et de rayon
Travaillons sur un exemple intéressant dont les résultats seront utiles dans les sections suivantes. Nous sommes tous à bord d’une centrifugeuse en rotation en ce moment : la Terre ! La rotation de la Terre crée une force centrifuge apparente, qui tend à nous éloigner du centre de la Terre. Heureusement, la gravité terrestre est suffisamment forte pour nous retenir ici. Sachant que le rayon moyen de la Terre est de 6 371 km, quelle est l’accélération centripète ressentie à l’équateur ?
Pour répondre à cette question, nous utilisons l’Équation (11.30). Le rayon est donné comme , et le taux de rotation est .
Accélération centripète à l’équateur due à la rotation de la Terre
Qu’en est-il de la magnitude de l’accélération centripète aux pôles ? Est-elle la même ? Gardez cette question à l’esprit ; nous y reviendrons dans la Section 12.2.1.
11.8.2Mouvement circulaire uniforme en trois dimensions
Jusqu’à présent, nous avons essentiellement travaillé en deux dimensions, en opérant « dans le plan » sans nous préoccuper de la façon dont ce plan pourrait être orienté en trois dimensions. Considérons maintenant le cas plus général. Nous souhaitons décrire la position, la vélocité et l’accélération de la particule sous forme de vecteurs tridimensionnels, où l’axe de rotation (qui est perpendiculaire au plan contenant le trajet circulaire) est orienté arbitrairement.
Supposons qu’une particule en position se déplace sur un trajet circulaire autour du point . Comme il existe de nombreux trajets circulaires différents contenant à la fois et , nous devons également spécifier un axe de rotation perpendiculaire au plan. Comme nous l’avons fait dans les chapitres précédents (voir la Section 5.1.3 et la Section 8.4), nous décrivons la direction de l’axe en utilisant un vecteur unitaire , et, comme précédemment, le signe de nous indique quelle direction est considérée comme rotation positive selon la règle de la main gauche. Le scalaire définit le taux de rotation, en radians par unité de temps. La question à laquelle nous voulons répondre est la suivante : quelle est la vélocité de la particule à cet instant ?
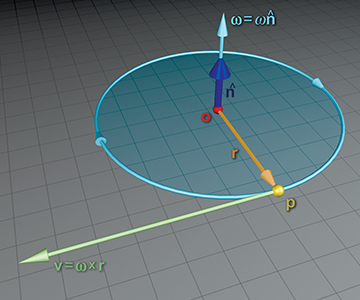
Figure 11.17Mouvement circulaire uniforme en trois dimensions
Rappelons ce que nous savons déjà. Premièrement, d’après la relation entre vitesse et fréquence angulaire observée précédemment, nous savons que la vitesse doit être , où est le rayon du cercle, c’est-à-dire la distance entre et . Deuxièmement, doit être perpendiculaire à , sinon la particule s’écarterait du plan contenant le trajet circulaire, et doit également être tangente à ce trajet. Ainsi, nous connaissons à la fois la magnitude et la direction de la vélocité , il nous faut juste un moyen de l’exprimer algébriquement. Pour ce faire, introduisons le vecteur , le vecteur radial de vers . Notons que se trouve dans le plan de rotation et a une longueur constante, le rayon du trajet circulaire, comme le montre la Figure 11.17.
Or, est perpendiculaire à la fois à (puisqu’elle est tangente au trajet) et à (puisqu’elle se trouve dans le plan orbital). Vous vous souviendrez peut-être que nous avons un outil permettant de calculer un vecteur perpendiculaire à deux autres vecteurs donnés : le produit vectoriel. Peut-être que ? La direction est correcte,40 mais considérons la longueur. Rappelons d’après la Section 2.12.2 que la longueur du produit vectoriel est égale au produit des magnitudes des entrées, multiplié par le sinus de l’angle entre les deux vecteurs. Or est un vecteur unitaire par hypothèse, et et sont perpendiculaires, donc le sinus de l’angle entre eux est égal à un. Ainsi, la longueur du produit vectoriel est simplement . La vitesse correcte est , il nous manque donc juste un facteur .
En rassemblant tout cela, nous obtenons la formule de la vélocité d’une particule de vecteur radial tournant autour de l’axe à un taux angulaire de radians par unité de temps :
Calcul de la vélocité linéaire d’un point à partir de la vélocité angulaire
Comme nous l’avons évoqué dans la Section 8.4, la vélocité angulaire est souvent décrite sous forme de carte exponentielle par un seul vecteur (noter le en gras pour indiquer une grandeur vectorielle). Dans ce cas, la formule est encore plus simple.
Calcul de la vélocité linéaire d’un point à partir de la vélocité angulaire
Considérons maintenant le problème inverse. Supposons que nous connaissions et , et que nous souhaitions mesurer la vélocité angulaire par rapport à . À nouveau, nous pouvons utiliser le produit vectoriel, mais cette fois, nous avons besoin d’une division pour obtenir la bonne longueur :
Vélocité angulaire d’une particule par rapport à un point arbitraire
Pour comprendre la division par , considérons deux points sur un disque rigide qui tourne autour de son centre. Supposons que la vélocité angulaire est mesurée par rapport à ce centre. Un point a le vecteur radial , et un autre a le vecteur radial , qui est dans la même direction depuis le centre, mais à une distance mise à l’échelle par le facteur . Ces deux points (en fait, tous les points du disque) devraient avoir la même vélocité angulaire. Ainsi, une division par est nécessaire pour compenser la variation de lorsqu’on ajuste le rayon. La division supplémentaire est nécessaire car les points extérieurs ont une vélocité plus élevée ; si on se déplace sur le disque en mettant à l’échelle par , le nouveau point aura une vélocité également mise à l’échelle par .
Bien que jusqu’à présent nous ayons supposé que tourne effectivement autour de , ce n’est pas forcément le cas. Il pourrait tourner autour d’un autre point, ou se déplacer en ligne droite. Cependant, nous pouvons quand même calculer la vélocité angulaire de par rapport à . En essence, ce que l’Équation (11.32) nous dit, c’est quelle serait la vélocité angulaire si orbitait effectivement autour de , dans le plan contenant à la fois et . L’axe de rotation, qui est parallèle à , est perpendiculaire à ce plan. Il y a en fait une légère complication — et pourraient ne pas être perpendiculaires, ce qui serait le cas si la particule orbitait autour de . Le produit vectoriel dans l’Équation (11.32) rejette essentiellement toute vélocité parallèle à ; seule la vélocité perpendiculaire à contribue aux résultats.
Si la particule orbite effectivement autour de à vitesse constante, alors la vélocité angulaire calculée par l’Équation (11.32) sera constante. En général, cependant, la vélocité angulaire mesurée par rapport à un point arbitraire n’est pas constante. Par exemple, considérons une particule se déplaçant avec une vélocité linéaire constante. La vélocité angulaire mesurée par rapport à un point stationnaire croîtra à mesure que la particule s’approche de , atteindra un maximum au point de plus proche approche, puis diminuera. De plus, même si la particule se déplace bien sur un trajet orbital, la vélocité angulaire ne sera constante que lorsqu’elle est mesurée par rapport au centre de l’orbite.
Un exemple extrêmement important de mouvement orbital en 3D est celui d’une particule attachée à un corps rigide tournant autour d’un axe. Choisissons à l’intersection de l’axe de rotation et du plan contenant l’orbite circulaire de ; cela rend perpendiculaire à l’axe de rotation. Dans ces conditions, la vélocité angulaire orbitale calculée par l’Équation (11.32) est la même pour chaque particule, et c’est également la même que la vélocité angulaire propre du corps rigide. Nous en dirons davantage dans le prochain chapitre.
Nous n’avons pas souvent besoin de calculer la vélocité angulaire d’un point par rapport à un point qui n’est pas le centre de l’orbite. (Cependant, l’Équation (11.31) est fréquemment utilisée pour calculer une vélocité linéaire de point basée sur sa vélocité orbitale.) Pourquoi en parlons-nous alors ? Parce que le calcul est similaire à la façon dont on mesure le couple (voir la Section 12.5) pour une force appliquée dans une direction arbitraire à un emplacement arbitraire.
Exercices
Le Pascal est une unité de mesure de la pression, définie comme un Newton par mètre carré. Un Pascal est égal à combien de psi ? (Le psi correspond à une livre de force par pouce carré.)
La position 1D d’une particule est décrite de façon continue par morceaux
Tracez le graphe du mouvement de la particule.
Quelle est la vélocité moyenne de la particule de l’Exercice 2 sur les intervalles suivants ?
(a) ?
(b) ?
(c) ?
(d) ?
(e) ?
Écrivez une fonction continue par morceaux similaire décrivant la vélocité de la particule de l’Exercice 2 au temps . Dans ce cas, la vélocité n’est pas définie aux « jonctions » entre les morceaux, donc ne vous préoccupez que de ce qui se passe au milieu de chaque morceau. (C’est malheureusement l’un de ces points plus délicats que nous avons dû sauter.)
Quelle est la vélocité instantanée de la particule de l’Exercice 2 aux instants suivants ?
(a)
(b)
(c)
(d)
(e)
(f)
(g)
(h)
Écrivez une fonction continue par morceaux similaire décrivant l’accélération de la particule de l’Exercice 2 au temps . À nouveau, ne vous préoccupez pas de ce qui se passe aux points de jonction.
Quelle est l’accélération de la particule aux instants suivants ?
(a)
(b)
(c)
(d)
(e)
(f)
(g)
(h)
Quelle situation physique est signifiée par un discriminant négatif dans l’Équation (11.16), donnant des solutions complexes ? Et si le discriminant est nul et qu’il n’y a qu’une seule solution ?
Un projectile est lancé avec une vitesse initiale de 150 ft/s, avec un angle d’inclinaison de 40° depuis la position initiale .
(a)Quelle est la vélocité initiale sous forme vectorielle ?
(b)À quel moment le projectile atteindra-t-il son apogée ?
(c)Quelles sont les coordonnées du projectile à l’apogée ?
(d)Combien de temps faudra-t-il au projectile pour revenir à une altitude de ?
(e)Quel sera le déplacement horizontal à cet instant ?
À la fin de notre discussion sur les projectiles dans la Section 11.6, nous avons posé le problème de résoudre pour le temps d’intersection lorsque l’accélération est un vecteur arbitraire . Prenez l’Équation (11.18) et faites le produit scalaire des deux membres avec , puis résolvez pour . (Utilisez la formule quadratique, comme précédemment.)
Les exponentielles complexes telles que (où est le nombre imaginaire tel que ) sont très importantes en équations différentielles, systèmes de contrôle et traitement du signal. Bien qu’il semble étrange de mettre un nombre complexe dans l’exposant, la formule d’Euler donne une interprétation significative. Pour trouver cette interprétation, vous pourriez aller sur wikipedia.com et la chercher (ce qui explique pourquoi la réponse se trouve dans la section des solutions en fin de livre, de toute façon). Mais avant de le faire, développez la série de Taylor de et voyez si vous pouvez le découvrir par vous-même. (Ensuite allez en ligne lire sur l’importance surprenante de cette expression.)
La Station spatiale internationale orbite la Terre à environ 340 km au-dessus de la surface terrestre. (L’orbite est en réalité elliptique, mais ignorez cela et supposez qu’elle se déplace en mouvement circulaire uniforme.) Sachant que la vitesse moyenne est d’environ 27 740 km/h, quelle est la période orbitale ? Quelle est l’accélération centripète en ? Réfléchissez bien !
Bien sûr, les mathématiciens savent comment écrire tous ces nombres. Vous pourrez lire un jour dans un livre de mathématiques comment les écrire tous sous une forme élaborée et élégante, mais il est d’abord utile de savoir de façon approximative de quoi vous essayez de parler.
— Richard Feynman (1918–1988) extrait de
The Feynman Lectures on Physics
Références
[1] Robert Resnick et David Halliday. Physics, troisième édition. New York : John Wiley and Sons, 1977.
Grâce à Heisenberg, nous savons que ce n’est pas possible au niveau atomique, mais quand nous disions « petit », nous ne voulions pas dire aussi petit.
Une unité astronomique est égale à la distance moyenne entre la Terre et le Soleil, soit environ 150 millions de kilomètres ou 93 millions de miles. C’est un grand nombre, mais je ne dirais pas qu’il est astronomique.
En fait, c’est encore plus facile maintenant. Seuls les dinosaures comme les auteurs savent lire une horloge analogique à aiguilles.
D’accord, celle-là n’est peut-être pas si familière. Elle l’est pour l’un des auteurs, mais c’est parce qu’il est britannique.
Par « chercher », nous entendons utiliser Internet. Il n’y a pas de place dans ce livre pour des tables d’informations facilement trouvables en ligne. Nous avions besoin de l’espace pour toutes nos opinions, blagues et notes de bas de page inutiles.
Ian Parberry est partagé à ce sujet. Bien qu’il soit britannique et pense qu’il devrait donc soutenir Newton, le directeur de thèse de son directeur de thèse... remontant 14 générations en arrière était Leibniz, et il se sent donc une certaine loyauté « familiale » envers lui.
Pascal et Descartes sont des « cousins » dans la lignée de directeurs de thèse d’Ian Parberry, remontant à la 16e génération, mais il ne peut s’empêcher de penser à la Chanson du Philosophe des Monty Python chaque fois qu’il pense à Descartes.
Surtout parce que c’est la chose la plus facile à créer pour des auteurs paresseux dans Photoshop.
La vitesse choisie pour le lièvre ressemble un peu à la réalité, mais pour des raisons pédagogiques et pour que la Figure 11.1 tienne bien sur une page, la vitesse de la tortue est totalement inventée. Les puristes doivent se rappeler que c’est une histoire avec un lapin et une tortue qui parlent. Oh, et un furlong vaut 1/8 de mile.
L’abréviation « fur » signifie « furlongs » et n’a rien à voir avec la fourrure du lapin.
Bien qu’il puisse sembler soigneusement arrangé que le mouvement du lièvre soit décrit par une équation quadratique à coefficients entiers, nous verrons plus tard que ce n’est pas si arrangé qu’on pourrait le croire. La nature semble apprécier les équations quadratiques. Mais vous avez raison sur les coefficients entiers, qui ont été soigneusement choisis.
Aucun jeu de mots n’était intentionnel. Malheureusement.
Incluant des notions telles que la continuité, les limites à gauche, à droite, etc.
Les auteurs définissent « avoir eu » comme : vous l’avez passé, vous l’avez compris et vous vous en souvenez.
Spoiler : nous vous l’avons déjà donné dans cette section !
Cela serait vrai si nous opérions dans une plage où la loi des gaz parfaits est une approximation valide, et que la température reste constante.
Pour ainsi dire.
Le lecteur attentif aura peut-être remarqué que, comme il n’y a qu’un nombre fini de grimpeurs à échantillonner, provient de données d’échantillons et présente donc des « marches » discontinues plutôt qu’une ligne lisse. À ces marches, la dérivée n’est pas vraiment définie. Pour les besoins de cette illustration, supposons que nous avons ajusté une courbe lisse aux données expérimentales afin d’obtenir une fonction continue.
Nous venons de faire des guillemets dans l’air avec nos doigts en écrivant ce mot.
Nous utilisons le mot « officiel » ici parce qu’il existe d’autres façons de définir la dérivée qui conduisent à des méthodes améliorées pour approximer numériquement les dérivées avec un ordinateur. Ces méthodes sont utiles lorsqu’une solution analytique est trop difficile ou trop lente à calculer.
Pour tous les puristes mathématiques qui s’offusquent des lignes verticales aux discontinuités où la dérivée est mathématiquement indéfinie, la justification de l’ingénieur dans cette situation et d’autres similaires est que la formule mathématique n’est qu’un modèle de ce qui est en réalité une situation physique.
Remarquez notre maladroit besoin de parenthèses avec pour éviter la notation potentiellement confuse .
Supposez que les rails sont droits, de sorte que les axes du corps du train sont alignés avec les axes du monde, et qu’aucune rotation n’est nécessaire.
Attention, est indéfini quand .
Dans ce cas particulier, la série de Taylor reçoit le nom plus spécifique de série de Maclaurin.
Nous soulignons que nous n’avons pas prouvé que ce sont les bonnes dérivées, parce que nous avons commencé avec le développement en série de Taylor, qui est en réalité défini en termes de dérivées.
Le bâtiment que tout le monde appelle encore la Tour Sears.
Eh bien, presque. Il y a certaines limitations que nous devons imposer à . Par exemple, si elle explose et tend vers l’infini, il est probable, bien que pas certain, que le déplacement sera infini ou indéfini. Dans ce livre, nous nous concentrons sur les phénomènes physiques et nous évitons ces problèmes en supposant que nos fonctions seront bien définies.
Cela revient aussi fréquemment lors des entretiens d’embauche.
La racine négative nous donne l’autre point où la parabole infinie contenant la trajectoire du roulement à billes croise le trottoir.
Nous utilisons , abréviation de « position », plutôt que , pour éviter l’hypothèse que la coordonnée est spéciale par rapport à ou .
À une exception près — voir l’Exercice 8.
Tout cela en supposant un mouvement de projectile idéal, qui ignore la résistance de l’air. Bien sûr, nous ne pouvons pas percuter un bâtiment adjacent, sinon le mouvement horizontal serait certainement pertinent.
Un salut à tous les fans des Eagles qui ont compris cette blague. Les autres le découvriront à la longue. Prenez-le facilement, surmontez-le, et vous aurez un sentiment paisible et facile.
En fait, « summierung » puisqu’il parlait allemand ; nous avons juste la chance que ça fonctionne aussi en anglais.
Cette affirmation s’applique plus généralement qu’on ne le reconnaît habituellement. Par exemple, si vous avez eu quelques cours de calcul, remarquez que la technique d’intégration connue sous le nom d’« intégration par parties » n’est en réalité que la règle du produit de la différentiation à l’envers !
Ni, comme nous l’avons appris de La Folle Journée de Ferris Bueller, facilement réinitialisé.
Du moins pas à cette fin. Quand la chaîne de distribution casse à 5 miles après l’expiration de votre garantie, ces valeurs brutes sont très importantes.
Oméga () est la lettre traditionnelle pour la fréquence angulaire. Pour voir d’où vient le calcul , considérez que la circonférence du cercle est , et cette distance est parcourue à la vitesse . Par conséquent, la fréquence angulaire est tours par seconde. Mais un tour est égal à radians, donc le facteur s’annule. C’est un exemple de la raison pour laquelle l’utilisation des radians est souvent si commode (à condition que nous travaillions de façon symbolique et que nous ne nous préoccupions pas des valeurs numériques des angles).
Ne faites pas seulement confiance à la Figure 11.17, utilisez votre main gauche pour vérifier cela. Votre pouce est le premier argument, ; l’index est le deuxième argument, ; et le majeur est le résultat, . Regardez votre main avec le pouce pointé vers vous (c’est l’axe de rotation, souvenez-vous), et faites tourner votre main dans la direction de (votre majeur), en effectuant la rotation autour de votre pouce. (La particule est à l’extrémité de votre index.) Votre main tournera dans le sens des aiguilles d’une montre de votre point de vue, ce qui est la définition d’une rotation positive selon la règle de la main gauche.
<< Sujets mathématiques issus des graphiques 3D
Retour en haut
Mécanique 2 : Dynamique linéaire et rotationnelle >>