Chapitre B
Réponses aux exercices
Je crois que chaque être humain a un nombre fini de battements de cœur.
Je n’ai pas l’intention d’en gaspiller un seul à courir faire des exercices.
— Buzz Aldrin (1930–)
B.1Chapitre 1
[4pt]
[4pt]Voir le tableau ci-dessous.
Main gauche
(a) Main droite. (b) Échanger et . (c) Échanger et .
(a)Main droite.
(b) , ,
(c) , ,
(a) Sens horaire (b) Sens antihoraire (c) Sens antihoraire (d) Sens horaire
(a) 15 (b) 30 (c) 3840 (d) 2016840 (e) 5050
(a) (b) (c) (d) (e) (f) (g) (h) (i) (j) (a) (b) (c) (d) (e) (f) (g) (h) (i) (j) L’épouvantail aurait dû dire :
La somme des carrés des jambes d’un triangle rectangle est égale au carré du côté restant.
puisque le théorème de Pythagore est , où et sont les jambes du triangle rectangle et est l’hypoténuse.
(a)
(b)
(c)
(d)
B.2Chapitre 2
est un vecteur ligne 2D. est un vecteur colonne 3D. est un vecteur colonne 4D.
“Combien pesez-vous ?” Votre poids est une grandeur scalaire. Mais la force de gravité, qui vous attire vers le bas, est un vecteur, et donc si vous avez dit que le poids était un vecteur pour cette raison, vous avez aussi raison. (“Mon poids est 150 livres de force dans la direction vers le bas.”)
“Savez-vous à quelle vitesse vous alliez ?” L’agent fait probablement référence à la rapidité de votre véhicule, qui est une grandeur scalaire.
“C’est à deux pâtés de maisons au nord d’ici.” Grandeur vectorielle.
“Nous voyageons de Los Angeles à New York à 600 mph, à une altitude de 33 000 pieds.” La vitesse “600 mph” est une grandeur scalaire. Puisque New York est à l’est de Los Angeles, on pourrait raisonnablement inférer une direction vers l’est, donc “600 mph vers l’est” est une vitesse, qui est une grandeur vectorielle. De même, “33 000 pieds” est une grandeur scalaire, bien que si vous êtes tatillon, vous pourriez dire qu’une direction “vers le haut” est implicite, auquel cas “33 000 pieds vers le haut” est une grandeur vectorielle.
[4pt]
[4pt]La taille d’un vecteur dans un diagramme n’a pas d’importance ; on a juste besoin de le dessiner au bon endroit. Faux. C’est l’inverse ; pour les vecteurs, la taille est importante (c’est-à-dire la longueur du vecteur), la position n’a pas d’importance.
Le déplacement exprimé par un vecteur peut être visualisé comme une séquence de déplacements alignés sur les axes. Vrai.
Ces déplacements alignés sur les axes de la question précédente doivent se produire dans l’ordre. Faux. On peut les appliquer dans n’importe quel ordre et obtenir le même résultat final.
Le vecteur donne le déplacement du point vers l’origine. Faux. C’est l’inverse ; le vecteur donne le déplacement de l’origine vers le point .
Définissons un triangle à l’aide des vecteurs , , et , et soit l’angle entre et . Alors la longueur au carré de l’arête est :
qui est la loi des cosinus.
Premièrement, obtenons quelques informations sur les composantes des vecteurs.
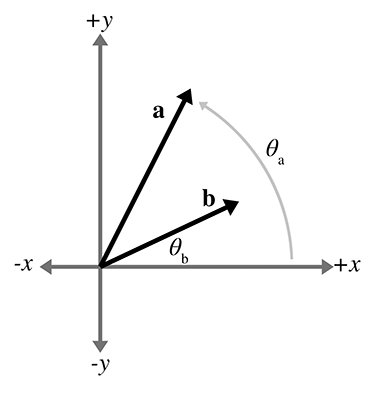
D’après la figure, on aOn peut maintenant procéder avec la définition algébrique du produit scalaire et l’identité de différence de cosinus :
(a)
(1)
(2)
(3)
(4)
(5)
(b)
(1)Le cercle unité pour la norme est un carré de côtés de longueur pivoté de .
(2)Le cercle unité pour la norme est le cercle unité bien connu que nous connaissons tous.
(3)Le cercle unité pour la norme infinie est un carré de côtés de longueur .
Notez que les trois cercles unitaires incluent les vecteurs , , , .
L’homme achète une boîte ou a un bagage qui fait 2 pieds de long, 2 pieds de large et 2 pieds de haut. Si l’objet est très mince, comme une épée, il peut mettre l’objet en diagonale dans la boîte ou le bagage. Le plus long objet qu’il pourrait emporter ainsi est pieds.
Posons . Par inspection de la Figure 2.11, on voit que
On confirme ceci numériquement en utilisant l’équation ci-dessus et les valeurs des autres vecteurs, également obtenues par inspection de la Figure 2.11 :
Main gauche.
Soit et . Alors
Soit et . Alors
Utilisez le signe du produit scalaire entre et pour déterminer si le point est devant ou derrière le PNJ. Cela découle de l’interprétation géométrique du produit scalaire,
où est l’angle entre et .
et sont toujours positifs, laissant le signe du produit scalaire entièrement à la valeur de . Si , alors est inférieur à et est devant le PNJ. De même, si , alors est supérieur à et est derrière le PNJ.
Le cas particulier de signifie que se trouve directement à gauche ou à droite du PNJ. Si ce cas n’a pas besoin d’être traité explicitement, il peut arbitrairement signifier soit devant soit derrière.(1) est devant le PNJ.
(2) est devant le PNJ.
(3) est derrière le PNJ.
(4) est derrière le PNJ.
(4) est derrière le PNJ.
(5) est devant le PNJ.
(6) est devant le PNJ.
(7) peut être soit devant soit derrière le PNJ, selon la façon dont on décide de gérer ce cas particulier.
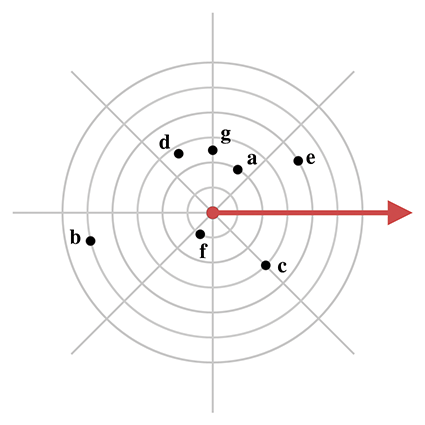
Pour déterminer si le point est visible par le PNJ, comparer à . Si , alors est visible par le PNJ.
La valeur de peut être obtenue à partir de l’angle du champ de vision. Pour obtenir , utiliser le produit scalaireLe champ de vision du PNJ est , donc la valeur qui nous intéresse est .
(1) est visible par le PNJ.
(2) n’est pas visible par le PNJ.
(3) n’est pas visible par le PNJ.
(4) n’est pas visible par le PNJ.
(5) est visible par le PNJ.
(6) n’est pas visible par le PNJ.
(7) n’est pas visible par le PNJ.
Le PNJ ne peut voir qu’à une distance de 7 unités, donc seuls les points qui sont à la fois dans le champ de vision et à cette distance seront visibles.
(1) est visible par le PNJ.
(2) n’est pas visible par le PNJ ; il est en dehors du champ de vision.
(3) n’est pas visible par le PNJ ; il est en dehors du champ de vision.
(4) n’est pas visible par le PNJ ; il est en dehors du champ de vision.
(5) n’est pas visible par le PNJ.
(6) n’est pas visible par le PNJ ; il est en dehors du champ de vision.
(7) n’est pas visible par le PNJ ; il est en dehors du champ de vision.
Posons et . Puisque les trois points se trouvent dans le plan , les deux vecteurs se trouvent aussi dans ce plan et on a
En calculant le produit vectoriel des vecteurs dans l’ordre dans lequel les points sont parcourus, on obtient :
Le signe de peut ensuite être utilisé pour déterminer le sens de rotation du PNJ. Comme on travaille dans un système de coordonnées main gauche, si la valeur est négative, le PNJ tourne dans le sens antihoraire ; si elle est positive, il tourne dans le sens horaire. Le cas particulier de 0 signifie que le PNJ marche soit en ligne droite vers l’avant, soit avance puis recule le long de la même ligne.
(1) . . . Donc le PNJ tourne dans le sens antihoraire.
(2) . . . Donc le PNJ tourne dans le sens antihoraire.
(3) . . . Donc le PNJ tourne dans le sens horaire.
(4) . . . Donc le PNJ tourne dans le sens antihoraire.
B.3Chapitre 3
(a) Espace objet.
(b) On pourrait comparer ma coordonnée en espace monde avec la coordonnée en espace monde du livre. Ou bien, on examine simplement le signe de la coordonnée en espace droit.
(c) Espace monde.
(d) Espace objet. Ou on pourrait dire qu’on peut calculer un produit scalaire avec notre vecteur de direction de regard — ce qui est équivalent à extraire la coordonnée dans l’espace objet.
D’abord translater le point de par rapport aux axes, puis faire pivoter de 42° dans le sens horaire autour de l’axe .
(a) Linéairement dépendants. Le deuxième vecteur de base est le vecteur nul, qui ne peut pas appartenir à un ensemble linéairement indépendant car il peut être exprimé comme le produit de n’importe quel autre vecteur de base et 0.
(b) Linéairement indépendants.
(c) Linéairement dépendants. Pour des vecteurs 3D, le plus grand ensemble linéairement indépendant qu’on pourrait espérer est trois vecteurs, mais cet ensemble en contient quatre.
(d) Linéairement dépendants. Le dernier vecteur est un multiple du premier.
(e) Linéairement dépendants. Le dernier vecteur est la somme des deux premiers.
(f) Linéairement indépendants.
(a) Orthogonaux.
(b) Non orthogonaux. Toutes les paires de vecteurs ont des produits scalaires non nuls.
(c) Orthogonaux.
(d) Orthogonaux.
(e) Non orthogonaux. La première paire de vecteurs est perpendiculaire, mais , et .
(a) Non. Les deuxième et troisième vecteurs de base n’ont clairement pas de longueur unité.
(b) Non. Aucun des vecteurs de base n’a de longueur unité.
(c) Oui, ils sont orthonormaux.
(d) Non. Les premier et deuxième vecteurs de base ne sont pas perpendiculaires.
(e) Oui, ils sont orthonormaux.
(f) Oui, ils sont orthonormaux.
(g) Non. Les deuxième et troisième vecteurs de base n’ont pas de longueur unité.
(a) Droit : ; Monde :
(b) Droit : ; Monde :
(c) Droit : ; Monde :
(d) Droit : ; Monde :
(e) Droit : ; Monde :
(f) Droit : ; Objet :
(g) Droit : ; Objet :
(h) Droit : ; Objet :
(i) Droit : ; Objet :
(j) Droit : ; Objet :
B.4Chapitre 4
Voir le tableau ci-dessous.
Matrice Lignes Colonnes Carrée Diagonale 4 3 Non Non 3 3 Oui Oui 2 2 Oui Non 5 2 Non Non 1 3 Non Non 4 1 Non Non 1 4 Non Non 3 1 Non Non
&4&3&3&3&4&3 &4&3&3&1&4&1 &3&3&3&3&3&3 &3&3&3&1&3&1 &2&2&2&2&2&2 &5&2&2&2&5&2 &1&3&3&3&1&3 &1&3&3&1&1&1 &4&1&1&3&4&3 &4&1&1&4&4&4 &1&4&4&3&1&3 &1&4&4&1&1&1 &3&1&1&3&3&3 &3&1&1&4&3&4 (a)
(b) Impossible ; on ne peut pas multiplier une matrice par un vecteur à droite.
(c)
[6pt]
[6pt](d)
(e) Impossible ; on ne peut pas multiplier un vecteur par un vecteur .
(f)
(g)
(h) Impossible ; on ne peut pas multiplier une matrice par une matrice à droite.
(a)
[4pt]
[4pt]
[4pt](b)
[6pt]
[6pt]
[6pt](c)
(d)
(a)
(b)
(c)
(d)
Pour chacune des matrices , interpréter les lignes de comme des vecteurs de base après transformation.
(a) Les vecteurs de base et sont transformés en et , respectivement. Ainsi, effectue une rotation de dans le sens horaire.
(b) Les vecteurs de base et sont transformés en et , respectivement. Ainsi, effectue une rotation de dans le sens antihoraire.
(c) Les vecteurs de base et sont transformés en et , respectivement. Ainsi, effectue une mise à l’échelle uniforme, redimensionnant les deux dimensions et par un facteur 2.
(d) Les vecteurs de base et sont transformés en et , respectivement. Ainsi, effectue une mise à l’échelle non uniforme, redimensionnant la dimension par 4 et la dimension par 7.
(e) Les vecteurs de base et sont transformés en et , respectivement. Ainsi, effectue une réflexion par rapport à l’axe , inversant les valeurs et laissant les valeurs inchangées.
(f) Les vecteurs de base et sont transformés en et , respectivement. Ainsi, effectue une combinaison de transformations : elle fait pivoter dans le sens horaire de et redimensionne uniformément les deux dimensions par 2. Cela peut être confirmé en multipliant les matrices appropriées des parties (a) et (c), qui effectuent ces transformations individuellement :
Cette matrice est antisymétrique, comme souhaité, puisque .
(a) 3 (b) 1 (c) 4 (d) 2
L’élément résultant est le produit de la -ième ligne de multiplié par le vecteur colonne . Pour avoir , la -ième ligne de doit capturer le -ième élément de ainsi que le négatif du -ième élément, mais exclure tous les autres. Cela signifie que
Ainsi,
L’élément résultant est le produit de la -ième ligne de multiplié par le vecteur colonne . Pour avoir , la -ième ligne de doit capturer tous les éléments de jusqu’au -ième élément inclus, mais exclure tous les autres. Cela signifie que
Ainsi,
Noter que la structure de fait que la -ième ligne de est équivalente à la différence entre la -ième et la -ième ligne de .
Noter que la structure de fait que la -ième ligne de est équivalente à la somme des premières lignes de .
B.5Chapitre 5
Oui, toute matrice exprime une transformation linéaire. De plus, comme toutes les transformations linéaires sont aussi des transformations affines, la transformation est également une transformation affine. (Il n’y a simplement pas de translation dans la transformation affine, ou de façon équivalente, la partie translation est nulle.)
(a)
(b) Ici, il faut appliquer les rotations inverses, dans l’ordre inverse.
Ou bien, on aurait pu déjà savoir que le résultat serait la transposée de la réponse du problème précédent. Si c’est le cas, bravo.
(c) Convertir l’axe de l’espace objet vers l’espace droit :
Bien sûr, c’est exactement la même chose qu’extraire la dernière ligne de la matrice.
B.6Chapitre 6
Le déterminant est
On calcule les cofacteurs
et on les place dans l’adjoint classique :
En divisant par le déterminant, on obtient l’inverse :
La matrice est orthogonale dans la tolérance appropriée.
Comme la matrice est orthogonale, son inverse est simplement sa transposée :
Cette matrice est une matrice de transformation affine standard avec une colonne la plus à droite de , comme discuté à la Section 6.4.3. Elle peut donc être décomposée en une partie linéaire et une partie translation :
Calculer l’inverse est maintenant facile, surtout quand on réalise que la partie linéaire est la même matrice que dans l’exercice précédent. Le seul travail réel est de multiplier la ligne de translation par l’inverse de la partie linéaire :
D’abord, calculer la matrice de rotation :
Maintenant, concaténer avec la matrice de translation de l’exercice précédent. On sait que cela va simplement copier la partie rotation dans le bloc supérieur, et la translation dans la ligne du bas.
Cette fois, on concatène les matrices dans l’ordre inverse, et la partie translation est pivotée.
B.7Chapitre 7
Dans certains endroits de cette section, on utilise la notation pour indiquer des coordonnées cartésiennes, et pour indiquer des coordonnées polaires. Si des coordonnées simples sont utilisées, le contexte indiquera clairement si les coordonnées sont cartésiennes ou polaires.
. Aucun crédit ne sera accordé si vous avez réellement pris la peine de calculer le sinus et le cosinus de 45,2°.
Remarquez que ce n’est réellement pas plus différent ni plus difficile de convertir des coordonnées polaires non canoniques en cartésiennes.
:
:
:
:
(a)
donc(b)
donc(c)
donc(d)
donc
(a)
donc(b)
, puisque et
donc(c)
donc(d)
, puisque et
donc
(a)
donc(b)
donc(c)
donc(d)
donc
(a1)
(a2)
donc(b1) est déjà dans l’ensemble canonique.
(b2)
donc(c1)
(c2)
donc(d1)
(d2)
donc
(a)
, étant donné l’emplacement de
donc(b)
, étant donné l’emplacement de
donc(c)
, étant donné l’emplacement de
donc(d)
, étant donné l’emplacement de
donc(e)
, étant donné l’emplacement de
donc(f)
donc
(a) Une sphère de rayon .
(b) Un plan vertical, obtenu en faisant pivoter le plan dans le sens horaire autour de l’axe d’un angle .
(c) Une « surface conique circulaire droite » (deux cônes circulaires verticaux se rejoignant pointe à pointe à l’origine). L’angle intérieur du cône est .
Elle était au pôle nord, donc l’ours était blanc.1
B.8Chapitre 8
(a) 5 (b) 3 (c) 6 (d) 1 (e) 2 (f) 4
(a) 3. Oui, ce sont des angles d’Euler canoniques.
(b) 4. Oui, ce sont des angles d’Euler canoniques.
(c) 5. Non, cette orientation est en blocage de cardan, et dans l’ensemble canonique, le roulis devrait être zéro.
(d) 1. Oui, ce sont des angles d’Euler canoniques.
(e) 2. Oui, ce sont des angles d’Euler canoniques.
(f) 3. Non, l’angle de tangage est en dehors de la plage légale.
(g) 5. Oui, ce sont des angles d’Euler canoniques.
(h) 2. Non, l’angle de tangage est en dehors de la plage légale.
(i) 6. Oui, ce sont des angles d’Euler canoniques.
(a)
(b) Tous les quaternions de rotation ont une magnitude de 1 !
(c)
(d) Cela correspond à un tangage de +30°.
(a) 2 (b) 5 (c) 1 (d) 3 (e) 2 (f) 1 (g) 4 (h) 6 (i) 3
(a) 5 (b) 2 (c) 6 (d) 1 (e) 3 (f) 5 (g) 4 (h) 2 (i) 3
D’abord, on extrait le demi-angle et l’axe de rotation :
Maintenant, on forme un nouveau quaternion en utilisant le nouveau demi-angle, :
(a)
(b)
(c)
[12pt] Après avoir développé ces produits puis simplifié les termes (une étape que nous avons omise car elle est très fastidieuse), on factorise :
B.9Chapitre 9
D’abord, on convertit le rayon en forme implicite en utilisant l’Équation (9.5) :
Ensuite, on convertit en forme pente-ordonnée selon l’Équation (9.6) :
Donc l’équation de la droite est .
La pente est et l’ordonnée à l’origine est 6.(a) ,
(b)
(c)
(d)
(e) ,
(f) D’abord, on détermine quels produits calculer en utilisant la technique de la Figure 9.4 :
En sommant les produits appropriés, on obtient
Remarquez comme cette boîte est beaucoup plus grande que celle des points transformés !
(a) D’abord, trouvons la normale en utilisant l’Équation (9.12) :
Normalisons-la :
Pour vérification, on confirme qu’on obtient le même résultat avec l’Équation (9.13) de la Section 9.5.3 :
Maintenant qu’on a , on peut calculer . On utilisera arbitrairement :
L’équation du plan pour ce triangle est
(b) Pour répondre aux deux questions, on calcule la distance signée par l’Équation (9.14) de la Section 9.5.4 :
Comme cette valeur est positive, on conclut que le point est du côté avant du plan.
(c) Résolvons d’abord ce problème en utilisant la méthode de projection 2D. L’axe dominant de la normale est , donc on supprimera les coordonnées des sommets et on projettera sur le plan . En appliquant la notation de la Figure 9.6 (mais avec des indices à base 1) :
(d)
(e) D’abord, on calcule les longueurs des côtés.
(f)
En utilisant l’Équation (9.13) :
En normalisant ce résultat, on obtient
Maintenant la valeur du meilleur ajustement est calculée par
Le polygone à sept côtés est décomposé en éventail de cinq triangles. Une façon possible de découper le polygone en éventail, basée sur la stratégie simple donnée à la Section 9.7.3, est
B.10Chapitre 10
Il s’agit d’une application directe de l’Équation (10.2).
(a)
(b)
(a)
(b) En utilisant le membre gauche de l’Équation (10.3), on a
(c) En utilisant l’Équation (10.4),
(d) En utilisant le membre droit de l’Équation (10.3), on a
(e) La formule correcte est donnée par l’Équation (10.3.4).
(f) Cette fois, on utilise l’Équation (10.7).
(a)
(b) Même qu’avant, 1,732.
(c)
(d)
(a) 2 (b) 1 (c) 4 (d) 6 (e) 3 (f) 5
(a) 7 (b) 3 (c) 1 (d) 10 (e) 4 (f) 2 (g) 9 (h) 6 (i) 8 (j) 5
Ici on encode chaque composante en multipliant par 127, en ajoutant 128, puis en arrondissant à un entier. Si une réponse est décalée d’1 pixel, c’est probablement acceptable. (Il vaut mieux s’assurer que est encodé comme zéro.)
(a) R=0, V=128, B=128 (b) R=162, V=60, B=230 [4pt] (c) R=128, V=128, B=255 (d) R=128, V=237, B=193 Normale espace Normale espace tangent Binormale modèle [4pt] (a) [4pt] (b) [4pt] (c) [4pt] (d)
B.11Chapitre 11
(a)
(b)
(c)
(d)
(e)
(a)
(b)
(c)
(d)
(e)
(f)
(g)
(h)
(a)
(b)
(c)
(d)
(e)
(f)
(g)
(h)
Un discriminant négatif indique que le sommet du mouvement (le déplacement maximal dans la direction de la vitesse initiale) n’est pas suffisamment grand pour atteindre le déplacement souhaité . Ainsi, il n’existe aucune valeur de pour laquelle le déplacement recherché sera atteint. Si le discriminant est nul, il existe exactement une solution à l’Équation (11.16), et le déplacement est égal au déplacement maximal au sommet.
Notez que si l’accélération et le déplacement ont le même signe, alors le discriminant ne peut jamais être positif, et il y aura toujours deux solutions, sauf dans le cas trivial où toutes les valeurs sont nulles.(a)
(b)
(c)
(d) C’est le double du temps pour atteindre le sommet, .
(e)
En développant la série de Taylor pour :
En substituant les puissances de (, , , etc.) :
On sépare maintenant les termes réels et imaginaires :
Les sommes peuvent être reconnues comme les développements en série de Taylor du cosinus et du sinus ; donc,
Cette équation est connue sous le nom de formule d’Euler. En substituant et en déplaçant tout au membre gauche, on obtient l’identité d’Euler, une belle équation qui relie cinq constantes mathématiques importantes :
Celle-ci a quelques astuces. D’abord, on doit calculer le rayon réel de l’orbite, en tenant compte du rayon moyen de la Terre de 6 371 km :
Maintenant, la longueur de l’orbite circulaire est simplement la circonférence d’un cercle de ce rayon, calculable par la géométrie élémentaire :
Enfin, on divise cette distance par la vitesse moyenne pour obtenir la période orbitale :
L’accélération centripète peut être calculée par l’Équation (11.29) :
B.12Chapitre 12
On doit tenir compte de toutes les forces agissant sur le ventilateur, l’air et le bateau. Quand le ventilateur tourne, il existe une force entre le ventilateur et l’air qui pousse l’air vers l’avant et le ventilateur vers l’arrière. Comme le ventilateur n’accélère pas vers l’arrière, on sait qu’il doit exister une force qui s’y oppose, et cette force provient de la friction exercée par le bateau. Mais cela signifie que le bateau reçoit une force vers l’arrière, et cette force vers l’arrière contrebalance toute force éventuellement reçue par le vent frappant la voile.
D’abord, on identifie quatre corps : la fille, le garçon, la corde et la Terre. Ensuite, on identifie les forces de tension et de friction actives :
Par la troisième loi de Newton, on suppose que chaque force à gauche est égale en magnitude mais opposée en direction à la force correspondante à droite. Ensuite, comme on suppose que l’élongation de la corde est négligeable, la tension à une extrémité doit être égale à la tension à l’autre extrémité, donc toutes les forces ont la même magnitude. Comme les enfants accélèrent tous les deux, il doit y avoir une force nette sur chacun d’eux causant leur déplacement. La Terre pousse la fille plus fort que la corde ne la tire, donc elle accélère vers l’arrière. Pour le garçon, c’est l’inverse, et les directions des forces lui font avancer vers l’avant. Donc la raison pour laquelle les enfants, en tant que système, accélèrent par rapport à la Terre est que la force de poussée de la fille est plus grande que celle du garçon, ce qui résulte en une force nette sur les enfants dans la direction de la fille.
Faux. L’accélération due à la gravité est constante, mais la force due à la gravité augmente proportionnellement à la masse.
Il s’agit d’une application directe de la loi de gravitation universelle de Newton avec la distance égale au rayon de la Terre plus l’altitude de l’orbite.
En insérant cette valeur et la masse de la Terre dans l’Équation (12.3), on a
On observe quelques éléments concernant ce résultat. Premièrement, il n’est certainement pas nul ; en fait, il n’est inférieur d’environ que 10% à l’accélération due à la gravité à la surface de la Terre. Bien que le terme « apesanteur » soit souvent utilisé pour décrire l’environnement des objets en orbite dans l’espace, on voit que ce terme est quelque peu impropre, car la gravité est bien réelle, même à 340 km au-dessus de la surface de la Terre. En fait, c’est la gravité qui fournit l’accélération centripète nécessaire pour maintenir l’orbite.
Deuxièmement, on compare ce résultat à ceux de l’Exercice 11.12, et on constate que les chiffres sont identiques. (Presque exactement les mêmes. La différence de 0,1% résulte de quelques légères simplifications du problème et d’arrondis.) Cette concordance nous amène à répondre à la deuxième partie du problème. L’apparente apesanteur existe parce que la station spatiale et tous les objets qu’elle contient sont en chute libre. L’apesanteur apparente se produit dans toute situation de chute libre, quelle que soit la force gravitationnelle et même si l’objet n’est pas en orbite (par exemple, dans un ascenseur en chute, un manège de parc d’attractions ou dans l’avion « vomit comet » de la NASA).
La différence entre un ascenseur en chute et un objet en orbite autour de la Terre est que la chute libre dans la station spatiale se poursuit indéfiniment. La vitesse et l’altitude orbitales sont choisies de telle sorte que l’accélération due à la gravité soit exactement égale à l’accélération centripète, et contrairement à un ascenseur en chute, la station spatiale ne se rapproche jamais du sol. La station spatiale continue de « tomber au-delà de l’horizon » et n’atteint jamais le fond.À l’angle critique, la force de friction statique équilibre exactement la composante latérale de la force gravitationnelle, . La friction maximale est égale à la magnitude de la force normale multipliée par le coefficient de friction statique . La force normale est égale à , la composante de la gravité perpendiculaire à la surface, et d’après le Tableau 12.1, le coefficient de friction statique entre le béton et le bois est de 0,62. Ainsi, on a
Les composantes normale et latérale de la gravité peuvent être exprimées en fonction de l’angle d’inclinaison comme
où est la magnitude totale de la force gravitationnelle sur le bloc. En insérant ces valeurs et en résolvant pour , on a
Notez que ni le poids du bloc ni l’accélération due à la gravité n’étaient pertinents dans cette expérience. Ainsi, si vous réalisiez cette expérience sur la lune, vous obtiendriez le même angle critique.
(a)La loi de Hooke nous dit . La force dans ce cas est la gravité, qui est proportionnelle à la masse et donnée par . Ainsi, la relation est
(b)En substituant dans l’équation obtenue en (a), nous avons
(c)
(d)En supposant que le ressort et l’environnement n’ont pas changé, on s’attendrait à ce qu’une masse de 1 kg provoque un allongement de 2 cm. Puisque la variation réelle de longueur était de 8 cm, il n’y a que deux explications.2 Soit la constante de raideur a été réduite, soit la force de pesanteur apparente a augmenté (ou les deux). Peut-être que le ressort était usé ? L’augmentation de la gravité pourrait être due à l’exécution de l’expérience sur une planète plus grande ou dans un référentiel non inertiel qui accélère vers le haut.
(a)
(b)L’amplitude est simplement le déplacement initial, 14,7 cm.
(c)Nous savons que le mouvement de la masse doit être de la forme . Nous avons déjà déterminé l’amplitude , et nous connaissons la fréquence angulaire .
Lorsque la masse passe par la position de repos, . Par conséquent, à cet instant, , et la vitesse estPuisque la vitesse est toujours positive, nous pouvons éliminer le « ».
Comme il n’y a pas de forces extérieures, le centre de masse du système homme + wagon ne se déplace pas, et la quantité de mouvement totale de ce système doit rester nulle en permanence. Nous désignerons par et les vitesses de l’homme et du wagon, respectivement, par rapport à la Terre.
(a)La vitesse relative de l’homme et du wagon est exprimée par
et nous savons également que la quantité de mouvement combinée du système doit rester nulle,
En substituant la première équation dans la deuxième, nous obtenons
Nous obtenons ainsi la vitesse inertielle de l’homme comme suit
(b)Tout d’abord, nous calculons la durée du trajet en considérant le mouvement de l’homme dans le repère fixé au wagon, comme suit
Nous multiplions ensuite les vitesses du wagon et de l’homme par cette durée pour obtenir leurs déplacements.
Une approche alternative consiste à reconnaître que le centre de masse du système ne se déplace pas, puisqu’il n’y a pas de forces extérieures, et à traiter l’homme et le wagon comme des masses ponctuelles. Puisque l’homme a parcouru la longueur du wagon,
Le déplacement de l’homme doit être compensé par le déplacement du wagon, de sorte que le centre de gravité ne se déplace pas.
Une fois encore, le système d’équations est résolu en substituant la première équation dans la deuxième.
(c)La vitesse du wagon augmenterait également dans la même proportion que celle de l’homme. En tout temps, la quantité de mouvement totale et le déplacement total du centre de masse seraient nuls. La configuration finale du wagon et de l’homme serait la même qu’auparavant.
(d)Ici, il suffit d’ajouter +5,00 m/s à nos résultats précédents.
(e)
Tout d’abord, nous devons calculer la normale de contact comme suit
et la vitesse relative comme suit
Nous substituons maintenant ces valeurs, ainsi que les masses et le coefficient de restitution, dans l’Équation (12.23), pour déterminer , l’intensité de l’impulsion de collision. (Notez que nous supposons également que est un vecteur unitaire, donc .)
L’impulsion vectorielle reçue par Kari (qui est ) est
Enfin, en calculant les vitesses après l’impact, nous obtenons
Parce que la force de gravité est toujours dirigée directement vers le bas, la courbure de la barre d’équilibre fait varier le bras de levier de chaque côté en fonction de l’angle du singe. Par exemple, si le singe commence à pencher vers la gauche, cela fait pivoter le poids à l’extrémité droite de la perche vers le haut. Dans cette situation, la force de gravité agit davantage perpendiculairement à la barre à droite (le bras de levier), et le couple est augmenté. En même temps, la masse à l’extrémité opposée pivote vers le bas, ce qui fait que la barre devient plus parallèle à la force de gravité, réduisant ainsi le couple. En d’autres termes, le couple restaurateur est toujours plus grand que le couple qui tendrait à le faire basculer, et lorsqu’il est debout, ils sont en équilibre.
Le cylindre creux sera plus difficile à faire rouler, car son moment d’inertie sera plus grand. Imaginez que les cylindres soient faits d’une substance compressible. Maintenant imaginez prendre un élément de masse individuel au centre du cylindre solide et le pousser vers l’extérieur. À mesure que le rayon augmente, le moment d’inertie de cet élément augmente. C’est essentiellement la différence entre les deux cylindres : le cylindre creux possède un anneau extérieur plus dense, avec davantage de sa masse repoussée vers l’extérieur.
(a)Nous déterminons d’abord la masse totale, qui est de 2200 kg. Puis nous calculons une moyenne pondérée des centres de masse selon l’Équation (12.22).
(b)Au moment de la rédaction de ce document, toutes les formules sont disponibles sur l’article Wikipédia Liste des tenseurs du moment d’inertie.
Avant du corps :Milieu du corps :
Arrière du corps :
Chaque roue :
(c)Nous appliquons le théorème des axes parallèles (Équation (12.31)) à chaque partie. Nous devons d’abord calculer la position de chaque partie par rapport au centre de masse du camion, que nous notons .
Avant du corps :Milieu du corps :
Arrière du corps :
Roue avant gauche :
Roue avant droite :
Roue arrière gauche :
Roue arrière droite :
Total :
B.13Chapitre 13
Nous pouvons résoudre cet exercice de plusieurs façons, mais comme il s’agit d’un chapitre sur les courbes, nous voulions que vous utilisiez les techniques d’interpolation polynomiale de la Section 13.2 pour ajuster une parabole aux « points de contrôle » donnés dans le problème. Ces points de contrôle partagent justement la suite des nœuds de l’exercice précédent, et nous espérions que vous en profiteriez. Le calcul commence par la multiplication de chaque polynôme de base de Lagrange par le point de contrôle correspondant.
(a)En commençant avec . Le premier tour d’interpolation :
Deuxième tour :
Et le tour final :
(c)En utilisant l’Équation (13.19) :
(d)
(e)En utilisant l’Équation (13.5) :
(f)
Les quatre points de contrôle doivent tous être au même endroit.
Il est évident que est le point de départ de la droite, et est le point d’arrivée, mais ce qu’il faut faire avec les points intérieurs et n’est pas aussi immédiat. Une façon de résoudre ce problème est d’écrire l’équation de la droite sous forme monomiale.
Maintenant, si nous extrayons les coefficients monomiaux
nous pouvons utiliser les Équations (13.20)–(13.23) pour convertir en forme de Bézier :
Notez que et sont mappés aux extrémités, comme prévu. Pour obtenir une vitesse constante, nous divisons la droite en tiers et plaçons les deux points intermédiaires à la jonction entre ces tiers.
Cela est logique quand on réfléchit à l’aspect d’une courbe à vitesse constante sous forme d’Hermite. Le vecteur différence doit être parcouru sur l’intervalle de temps unitaire, donc les vecteurs de vitesse désirés et sont tous deux égaux à ce vecteur différence. En rappelant la relation entre les points de contrôle de Bézier et les vecteurs d’Hermite (Équations (13.32)–(13.35)) on parvient à la même conclusion que ci-dessus.
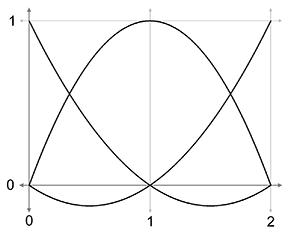
Cela est également logique quand on pense à la base de Bernstein. Rappelons que chaque fonction de base a un maximum local en où le point de contrôle correspondant exerce le plus d’influence sur la courbe.Nous espérons que vous avez réussi à résoudre celui-ci uniquement en y réfléchissant. Nous savons que les vitesses initiale et finale de la courbe sont nulles, et donc sous forme d’Hermite les vecteurs et sont nuls. Puisque les points de contrôle intérieurs de Bézier sont décalés des extrémités d’un tiers de la vitesse, cela signifie que le deuxième point de contrôle doit être le même que le premier, et le troisième point de contrôle doit être le même que le dernier :
Pour résoudre celui-ci, convertissons en forme d’Hermite et examinons les vitesses initiale et finale :
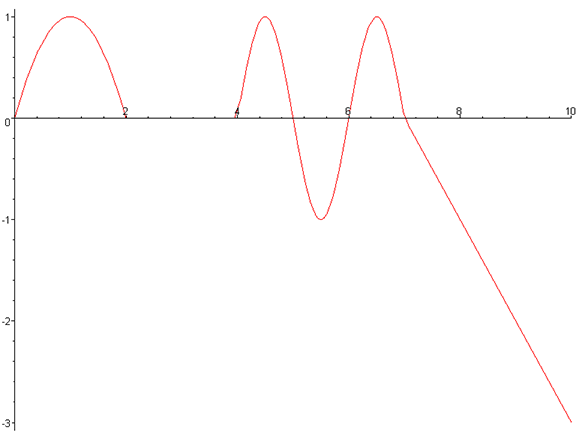
Nous savons d’après l’Exercice 6 que si les points intérieurs sont distribués de manière égale, en divisant l’intervalle en tiers, alors la courbe résultante a une vitesse constante. Mais maintenant, les points de contrôle intérieurs sont plus éloignés de leur extrémité voisine qu’un tiers de l’intervalle total ; la distance est égale à la longueur totale de l’intervalle. Ainsi les vitesses initiale et finale sont trois fois plus rapides. Cela signifie que nous partons « trop vite » et devons ralentir quelque part au milieu, puis accélérer de nouveau jusqu’à la grande vitesse finale. Jusqu’où doit-on ralentir ? Traçons la courbe pour voir.
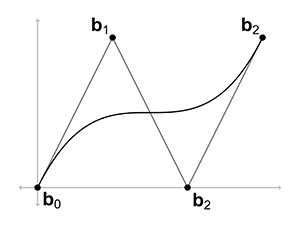
Ici les points de contrôle sont régulièrement espacés sur l’axe des , donc la courbe se déplace à vitesse horizontale constante. Les coordonnées sont distribuées selon la description de cet exercice, et comme vous pouvez le voir, la vitesse verticale initiale est grande, elle ralentit jusqu’à un minimum en , puis accélère jusqu’à une vitesse finale élevée. À en juger par le diagramme, la pente est horizontale au point milieu , ce qui signifie que la vitesse verticale est nulle.Nous pouvons résoudre ceci algébriquement. Tout d’abord, nous devons convertir notre réponse de l’Exercice 2 en une courbe sous forme monomiale avec un paramètre normalisé. Rappelons que la courbe est tracée lorsque varie de 0 à 2, mais toutes nos courbes ont utilisé un argument variant de 0 à 1. Nous poserons donc et établirons une nouvelle courbe en termes de :
En écrivant les coefficients monomiaux, nous obtenons
Nous pouvons maintenant convertir en forme de Bézier en utilisant les Équations (13.20)–(13.23) :
Notre première tâche consiste à convertir la courbe de la forme fonctionnelle en forme paramétrique . Nous supposerons que est une fonction linéaire de , donc nous résolvons avec et . Cela nous donne . Les coordonnées des points de contrôle de Bézier sont facilement déterminées en utilisant les résultats de l’Exercice 6. Nous avons choisi comme fonction linéaire de car nous supposons qu’il a une vitesse horizontale constante, donc les coordonnées des points de contrôle sont régulièrement espacées en et . En récapitulant les quatre points de contrôle, nous avons
Les coordonnées étaient triviales dans ce problème ; tout le vrai travail se trouvait dans les coordonnées . En substituant dans notre forme fonctionnelle, nous obtenons
ce qui est une courbe cubique 1D parfaitement valide sous forme monomiale. Nous la convertissons en forme de Bézier en utilisant les Équations (13.20)–(13.23) :
Remarquez que les deux coordonnées médianes sont presque égales, car les points de départ et d’arrivée que nous avons choisis rendent notre parabole légèrement asymétrique.
En rassemblant tout cela, nos quatre points de contrôle de Bézier sont(a)Pour le premier point de contrôle, nous effectuons l’algorithme de de Casteljau ordinaire en utilisant 0,2 à chaque tour.
Pour le deuxième point de contrôle, nous effectuons le dernier tour avec la fraction 0,5.
Pour le troisième point de contrôle, nous effectuons les deux derniers tours avec la fraction 0,5.
Pour le dernier point de contrôle, nous effectuons tous les tours avec 0,5 comme fraction.
(b)
(c)En utilisant l’Équation (13.38) avec :
B.14Chapitre 14
Quarante-deux.
Pour tout problème complexe
il existe une réponse claire, simple, et
fausse.
— H. L. Mencken
C’était un ours polaire. Vous saisissez ? Polaire !
Aucun crédit n’est accordé pour avoir suggéré que « la physique a cessé de fonctionner ». En revanche, si vous avez répondu « nous sommes à l’intérieur d’un jeu vidéo », accordez-vous 20 points de crédit supplémentaires.
Haut de page